

UWB positioning method based on KF algorithm, Chan algorithm and Taylor algorithm
A positioning method and algorithm technology, applied in the field of positioning and navigation, can solve problems such as the influence of ranging accuracy, and the positioning accuracy is difficult to reach centimeter level, and achieve the effect of improving positioning accuracy, high engineering application and commercial value, and reducing non-line-of-sight errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0046] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
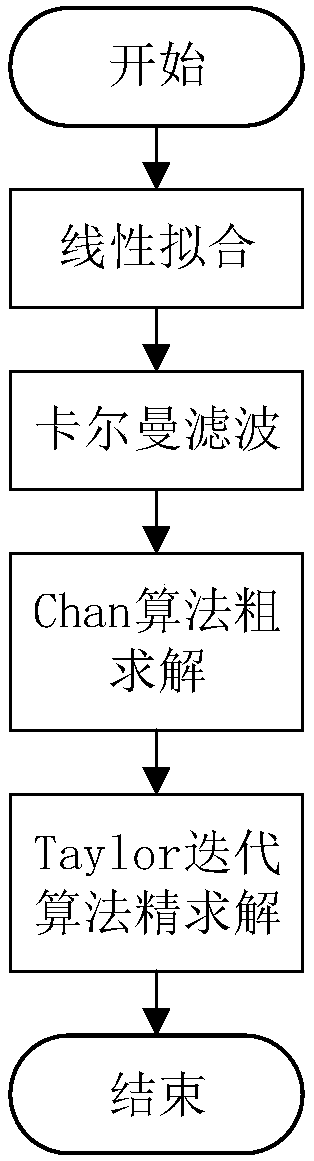
[0047] Such as figure 1 As shown, the UWB positioning method based on KF algorithm, Chan algorithm and Taylor algorithm of the present invention comprises the following steps:
[0048] Step 1, place the tag to be tested on the carrier to be tested, and in the environment of four positioning base stations, establish a fitting equation for the distance from the tag to be tested to each base station, and perform the fitting process; the fitting method is Linear fitting method, the distance from the tag to be tested to each base station is the average value of the distance from the tag to be tested to each positioning base station collected when the tag to be tested is placed statically;
[0049] Step 2, using the Kalman filter model to filter the fitting result of the step 1:
[0050]KF (Kalman filter) has the advantages of high efficiency, real...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More