

A feature point processing method and device
A processing method and feature point technology, applied in the computer field, can solve problems such as non-line-of-sight error and non-line-of-sight propagation, and achieve the effect of reducing non-line-of-sight error and improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
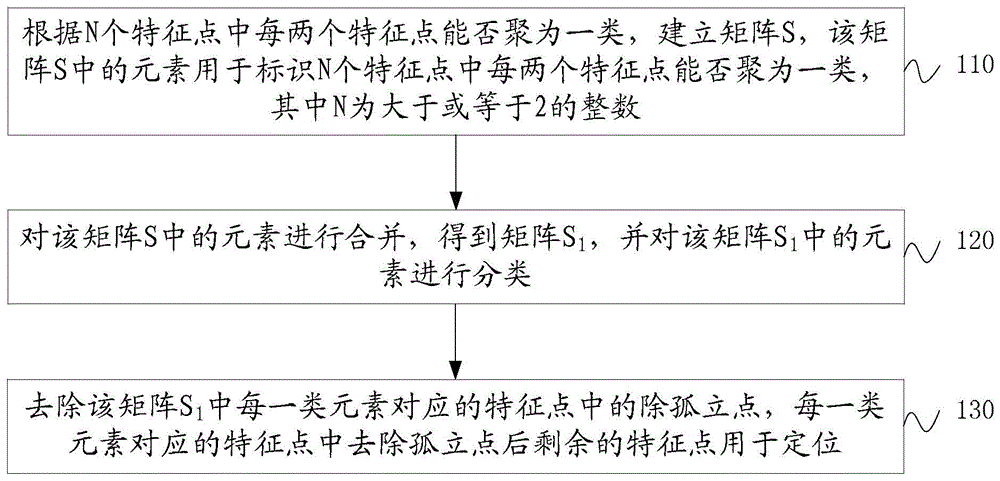
[0026] Such as figure 1 As shown, this embodiment provides a feature point processing method, including:
[0027] 110. According to whether every two feature points in the N feature points can be clustered into one class, a matrix S is established, and the elements in the matrix S are used to identify whether every two feature points in the N feature points can be clustered into one class, Wherein N is an integer greater than or equal to 2.
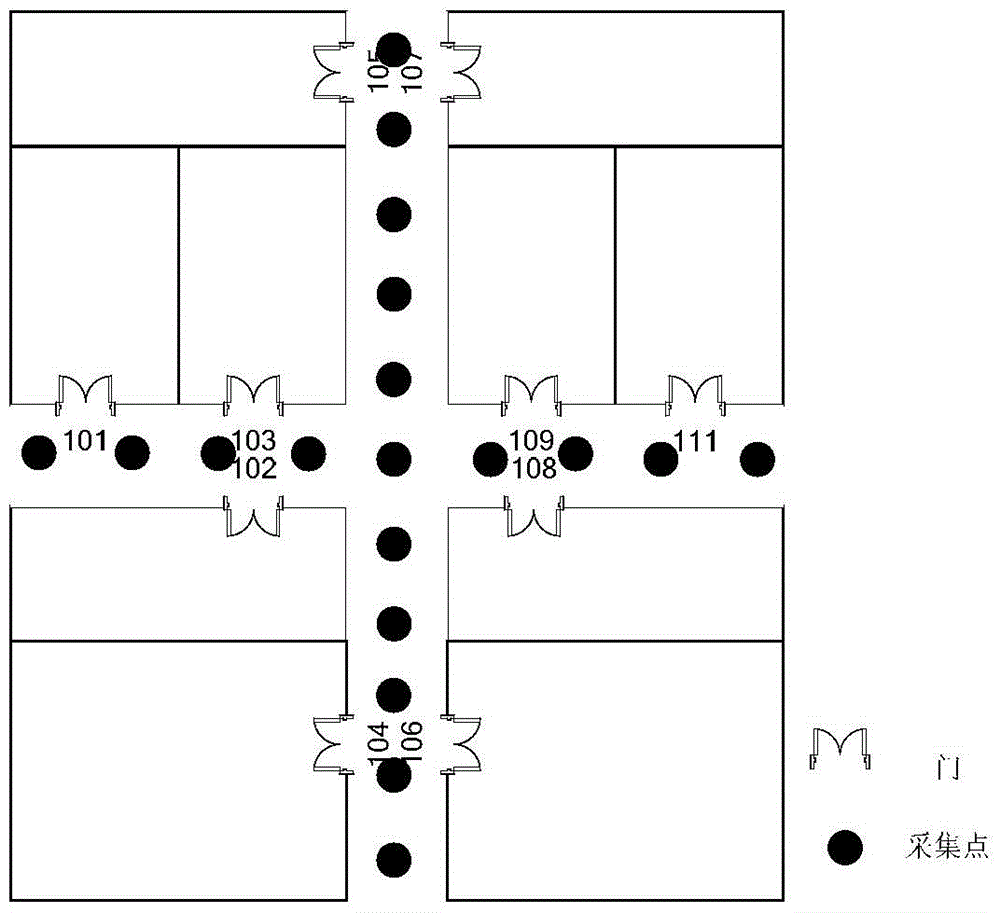
[0028] Wherein, the feature points are selected in advance, and the embodiment of the present invention does not limit the selection method of the feature points. figure 2 is a schematic diagram of a specific indoor scene, figure 2 The middle point is the selected feature point.
[0029] 120. Merge the elements in the matrix S to obtain the matrix S 1 , and for the matrix S 1 The elements in are classified.
[0030] Optionally, the same elements in the matrix S can be combined to obtain the matrix S 1 .
[0031] 130. Remove the ...
Embodiment 2
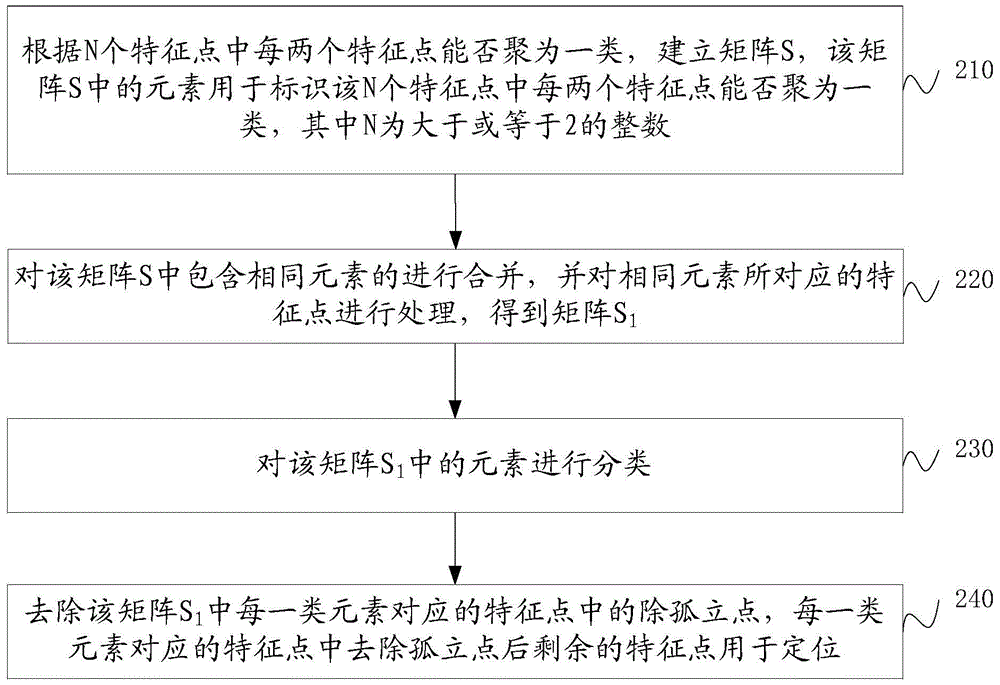
[0036] Such as image 3 As shown, this embodiment provides a feature point processing method, including:
[0037] 210. According to whether every two feature points among the N feature points can be clustered into one class, a matrix S is established, and the elements in the matrix S are used to identify whether every two feature points among the N feature points can be clustered into one class , where N is an integer greater than or equal to 2.
[0038] In this embodiment, it can be based on
[0039] | Δe a , b ( 1 , 2 ) | ≤ 4 d ( 1 , 2 ) + n - - - ( 1 )
[0040] Determine whether every two feature points in the N feature points can be clustered int...
Embodiment 3
[0076] Figure 5 For a positioning method provided in this embodiment, after processing by the feature point processing method in the above-mentioned embodiment 1 or 2, the positioning method uses the processed feature points to realize positioning, and the method includes:
[0077] 510. The positioning device matches the received X-channel TDOA signal with the pre-stored feature signal to obtain the target feature point most similar to the TDOA, where X is an integer greater than or equal to 2.
[0078] Specifically, the positioning device matches the received multiple TDOA signals with pre-stored feature signals to obtain the feature point most similar to TDOA, which is the target feature point.
[0079] And according to the feature point processing method of embodiment 1 or 2, a total of M feature points of the same type as the target feature point are obtained.
[0080] 520. The positioning device classifies the N feature points including the target feature point, and det...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More