

Integrated control method for tethered robot approaching target pose
A tethered robot and control method technology, which is used in the control of finding targets, program-controlled manipulators, and manipulators, etc., can solve the problems of easy vibration of position and posture, insufficient consideration, and instability of position control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0099] The present invention is described in further detail below in conjunction with accompanying drawing:
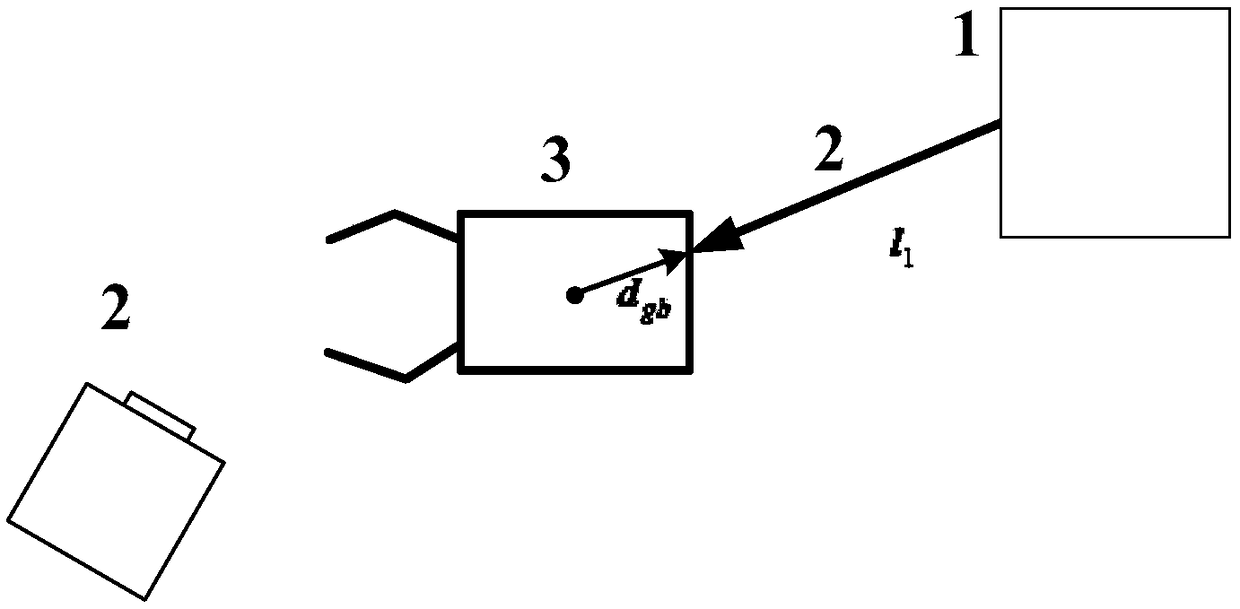
[0100] see figure 1 with figure 2 , figure 1 It is a schematic diagram of the tethered robot approaching the target of the present invention, wherein 1 is the operating platform, 2 is the tether, 3 is the operating gripper, and 4 is the target. An integrated control method for the tethered robot approaching the target pose provided by the present invention, Include the following steps:
[0101] 1. Establishment of tethered robot attitude-orbit integration model:
[0102] The coordinate system used is defined as follows: is the body coordinate system of the manipulator, O I x I Y I Z I is the inertial coordinate system; the absolute attitude angle of the paw is expressed as o t1 x t1 the y t1 z t1 is the tether coordinate system of the tether, in the present invention the tether is simplified as a massless section, and the inertial coordinate system rota...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More