

A tethered robot approaching target pose integrated control method
A technology of tethered robot and control method, which is applied in the direction of target-seeking control, program control manipulator, manipulator, etc., and can solve problems such as insufficient consideration, instability of position control, and easy oscillation of pose and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0099] The present invention is described in further detail below in conjunction with accompanying drawing:
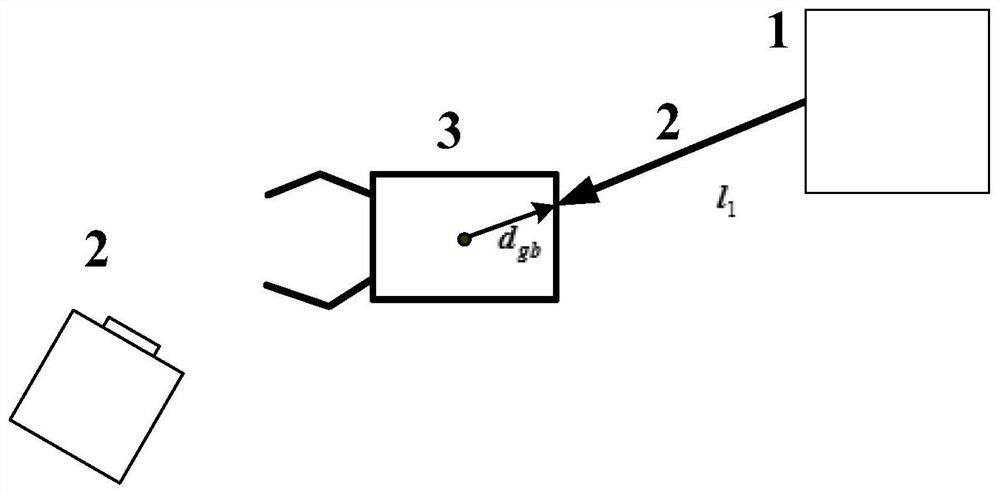
[0100] see figure 1 and figure 2 , figure 1 It is a schematic diagram of a tethered robot approaching a target in the present invention, wherein 1 is an operating platform, 2 is a tether, 3 is an operating gripper, and 4 is a target. An integrated control method for a tethered robot approaching a target pose provided by the present invention, Include the following steps:
[0101] 1. Establishment of tethered robot attitude-orbit integration model:
[0102] The coordinate system used is defined as follows: is the body coordinate system of the manipulator, O I x I Y I Z I is the inertial coordinate system; the absolute attitude angle of the paw is expressed as o t1 x t1 the y t1 z t1 is the tether coordinate system of the tether, in the present invention the tether is simplified as a massless section, and the inertial coordinate system rotates around the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More