

Integrated dual seven-freedom-degree mechanical arm omnidirectional mobile robot system and control method
A robot system, omnidirectional movement technology, applied in the field of integrated dual 7-degree-of-freedom robotic arm omnidirectional mobile robot system and control, can solve the problems of inability to meet the requirements of flexibility and flexibility, inability to ensure environmental adaptability, etc. Smooth and continuous movement process, improved kinematics and dynamics, guaranteed flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
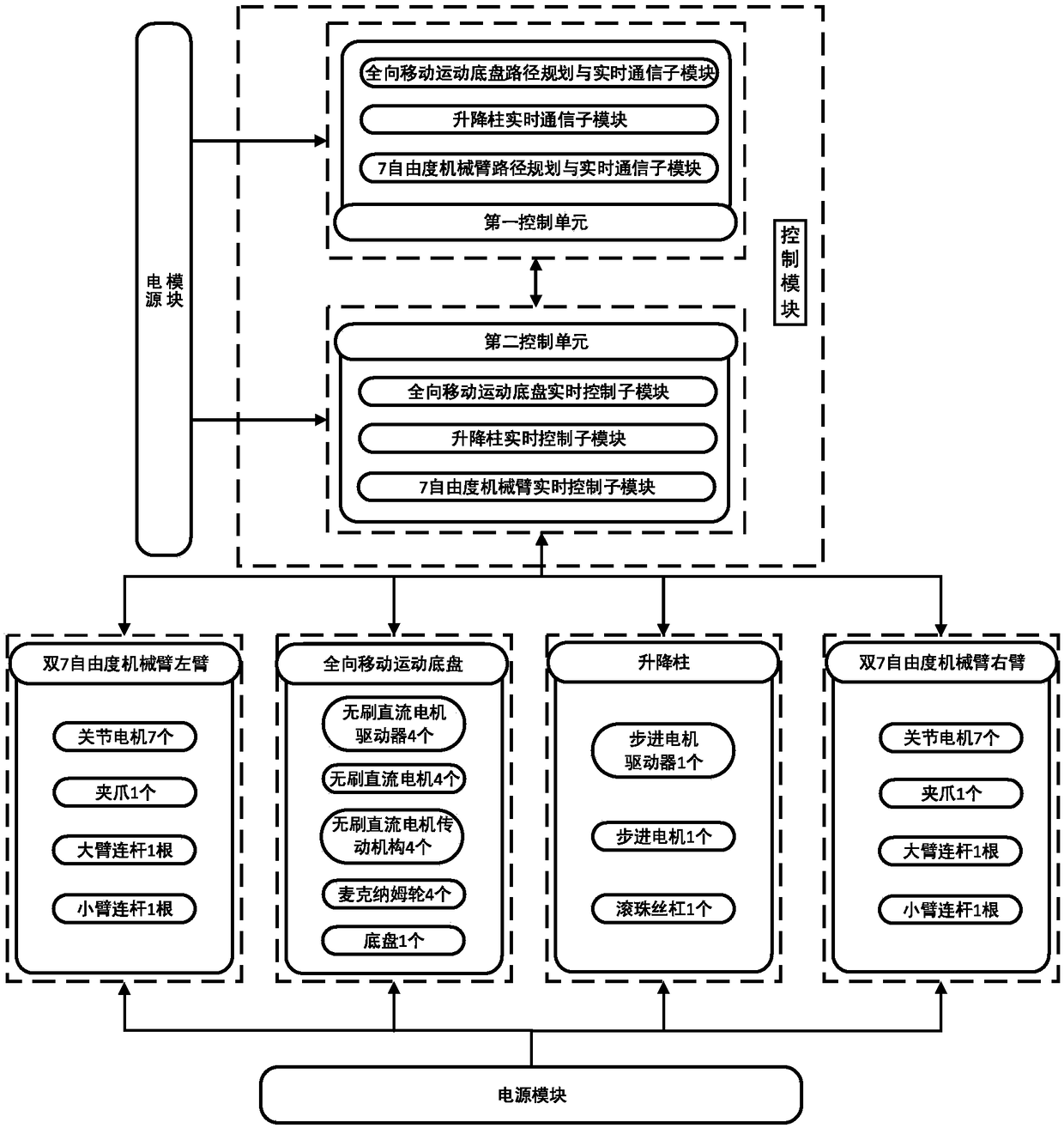
[0044] The invention provides an integrated dual 7-degree-of-freedom omnidirectional mobile robot system and control method, which are mainly used in the application fields of dual 7-degree-of-freedom omnidirectional mobile robots such as sorting robots, service robots, and collaborative robots.
[0045] In the present invention, the integrated double 7-degree-of-freedom mechanical arm omnidirectional mobile robot system and control method have the same physical coordinate system and a double-arm structure in the space of the control system, and each mechanical arm has redundant degrees of freedom, ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Width | aaaaa | aaaaa |
| Wheel diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More