Wall climbing robot
A wall-climbing robot and robot technology, applied in the field of wall-climbing robots, can solve the problems of reducing the adsorption force of the working surface of the magnetic device, reducing the reliability of the wall-climbing robot, and the detachment of crawler parts, so as to prevent phase detachment, improve the fit, The effect of improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the purpose, features and advantages of the present invention more obvious and understandable, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described The embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without making creative efforts belong to the protection scope of the present invention.
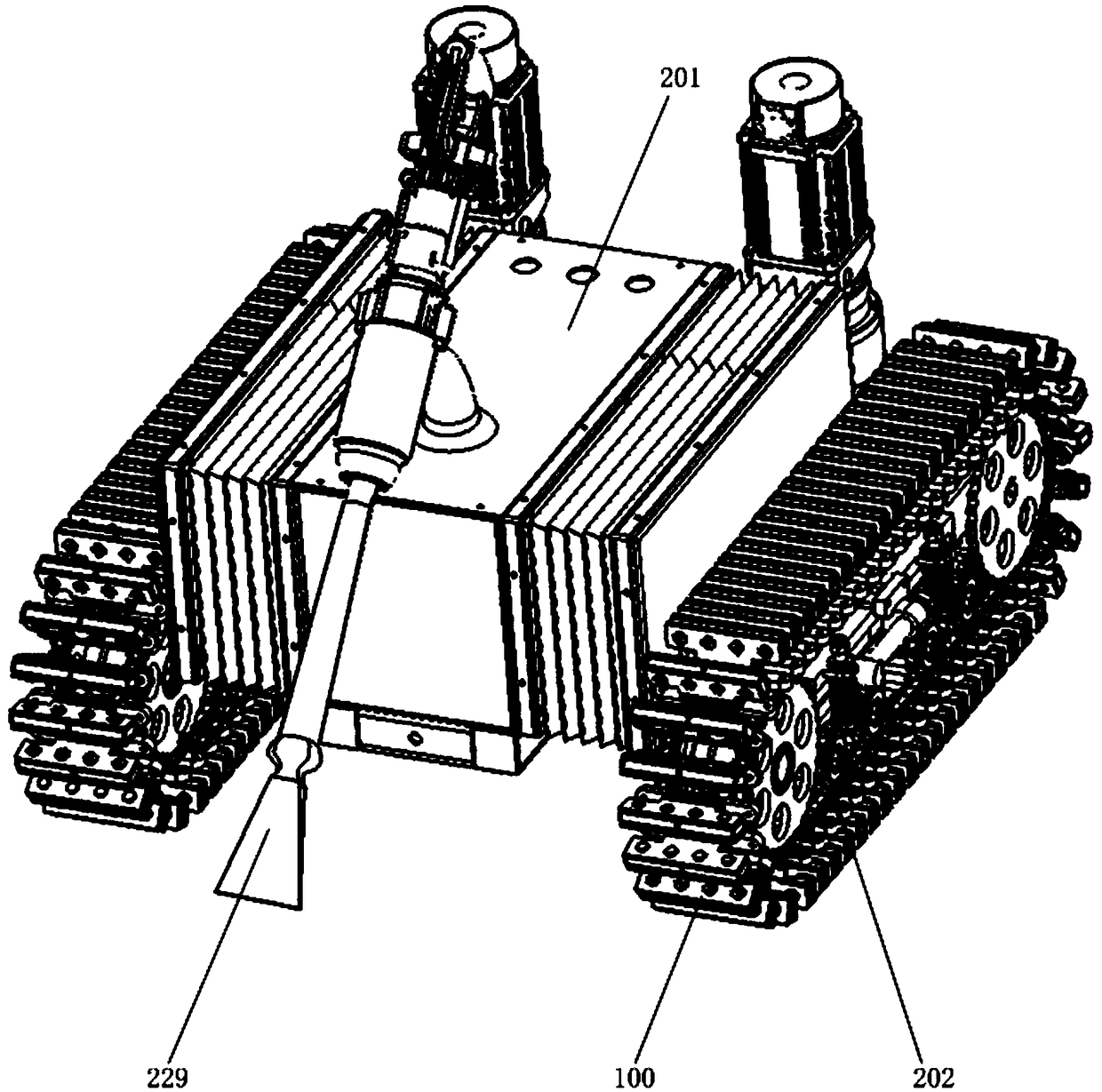
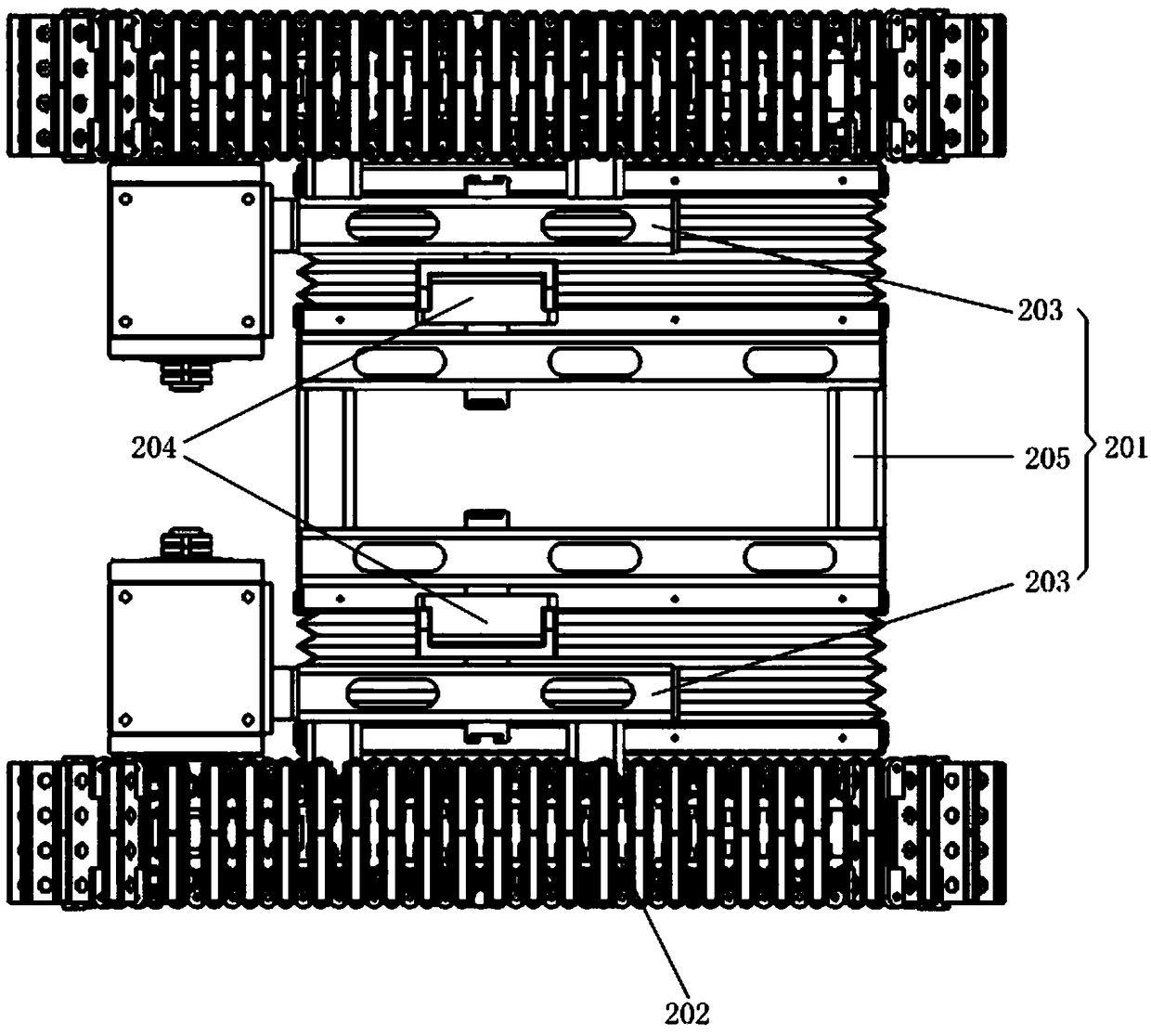
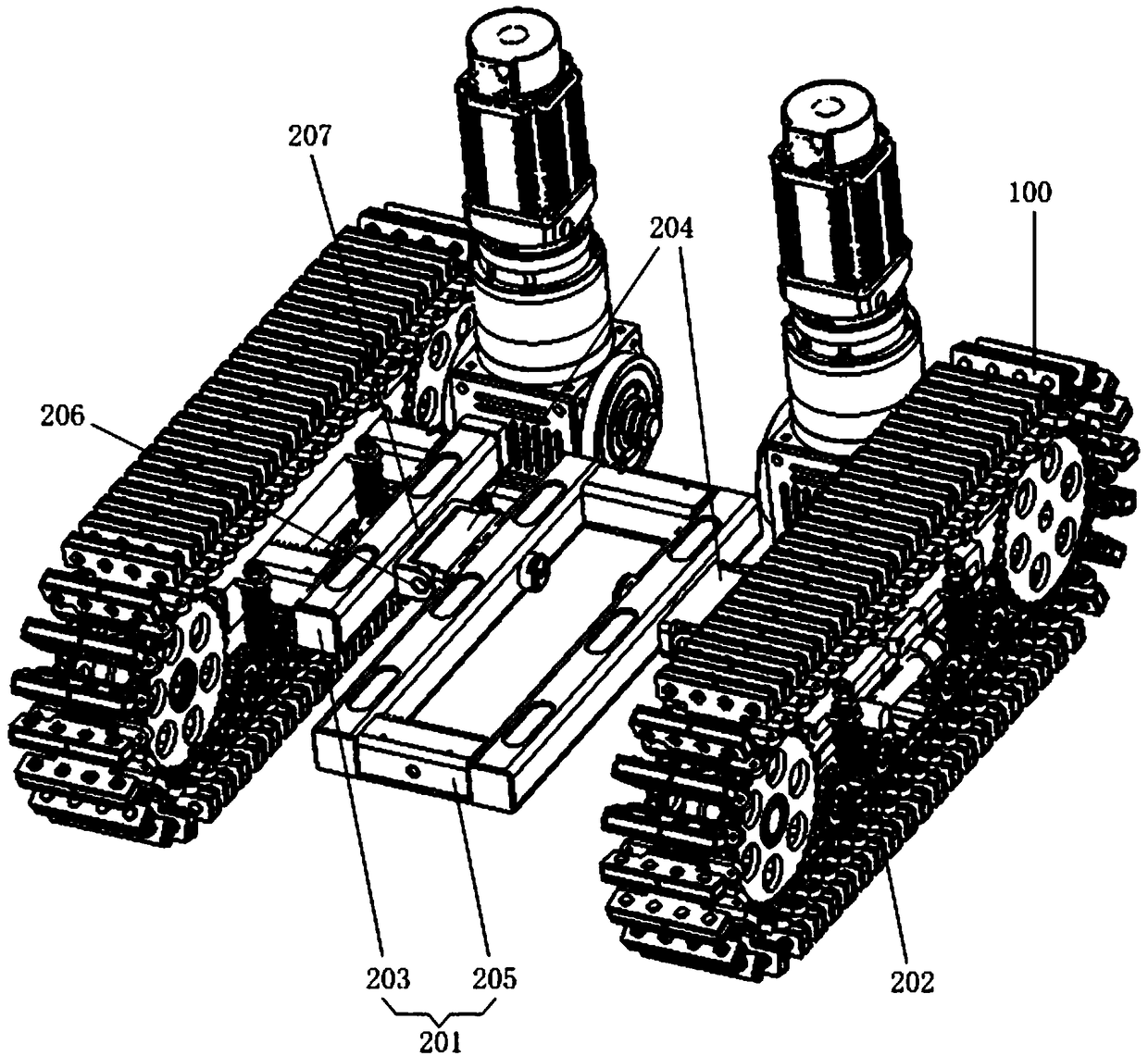
[0031] Please refer to Figure 1-3 , the embodiment of the present invention provides a wall-climbing robot, including a robot body 201 and a walking device 202, the robot body 201 includes a first body part 203, and there are multiple first body parts 203, and the plurality of first body parts 203 along the robot body 201 are arranged at in...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap