

Air pump telescopic type spatial overturning grabbing walking robot
A walking robot, telescopic technology, applied in manipulators, motor vehicles, program-controlled manipulators, etc., can solve problems such as high risk of operation, complex environment, complex and heavy rescue machinery and equipment, and achieve the effect of reducing life-threatening
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
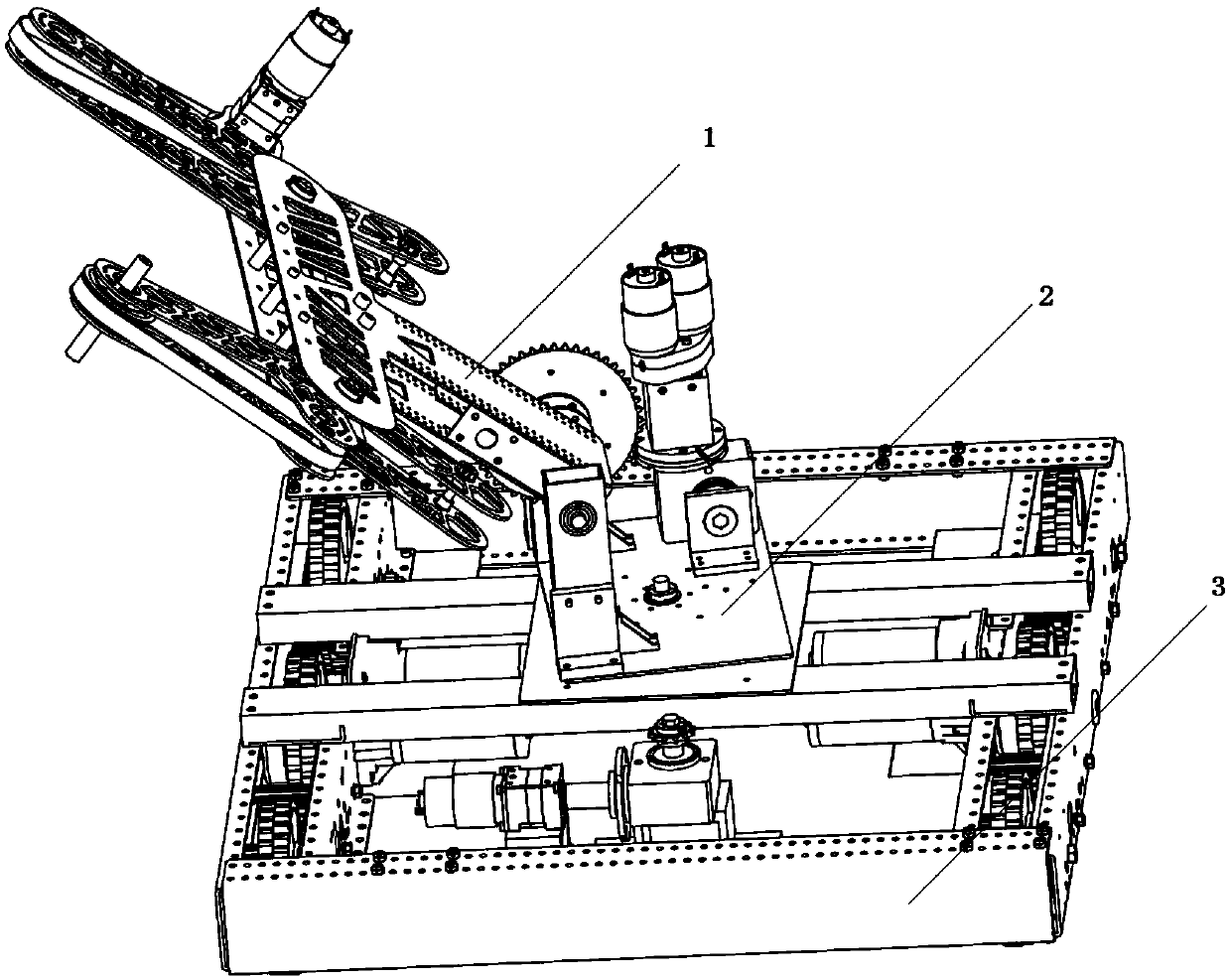
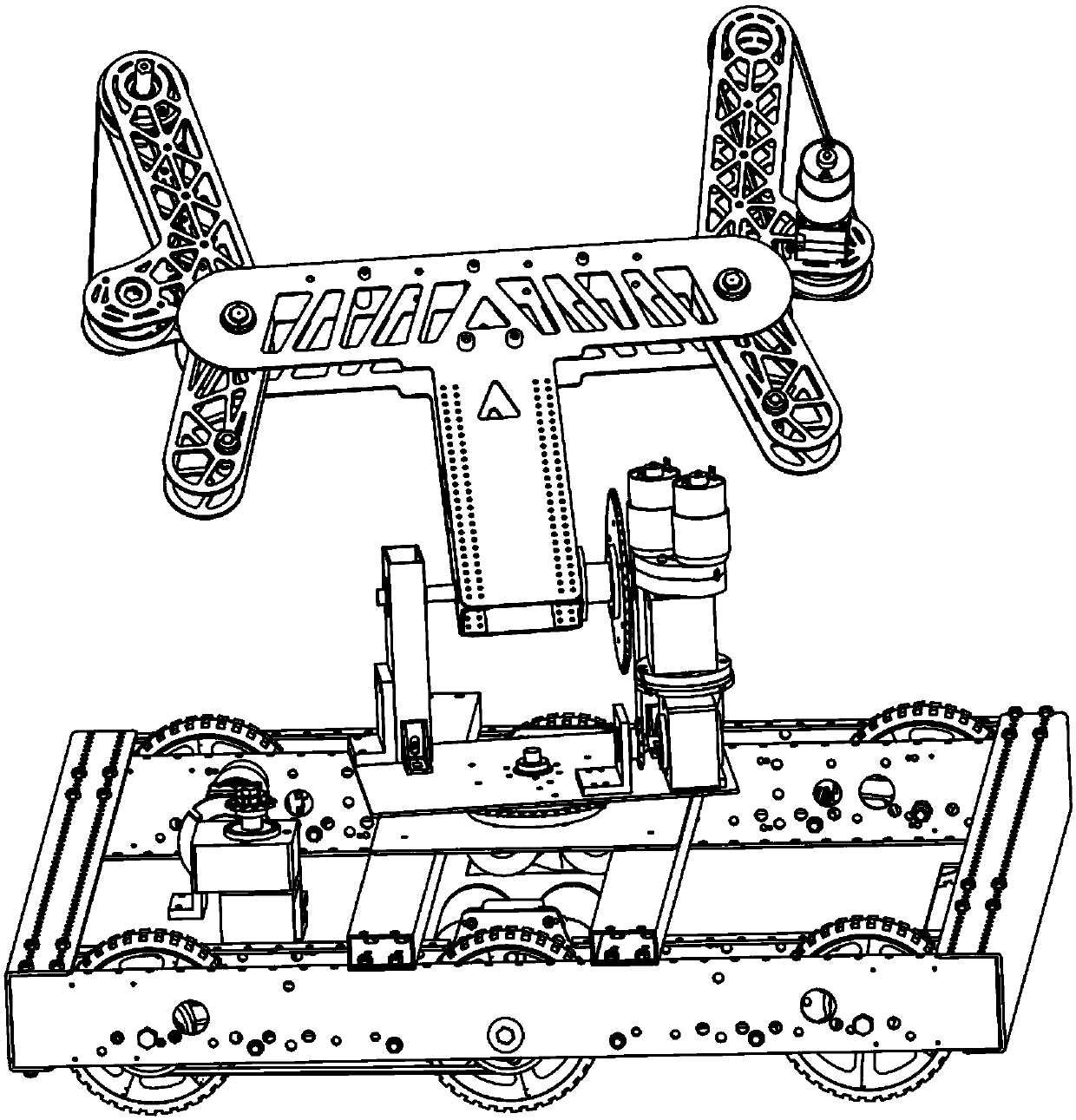
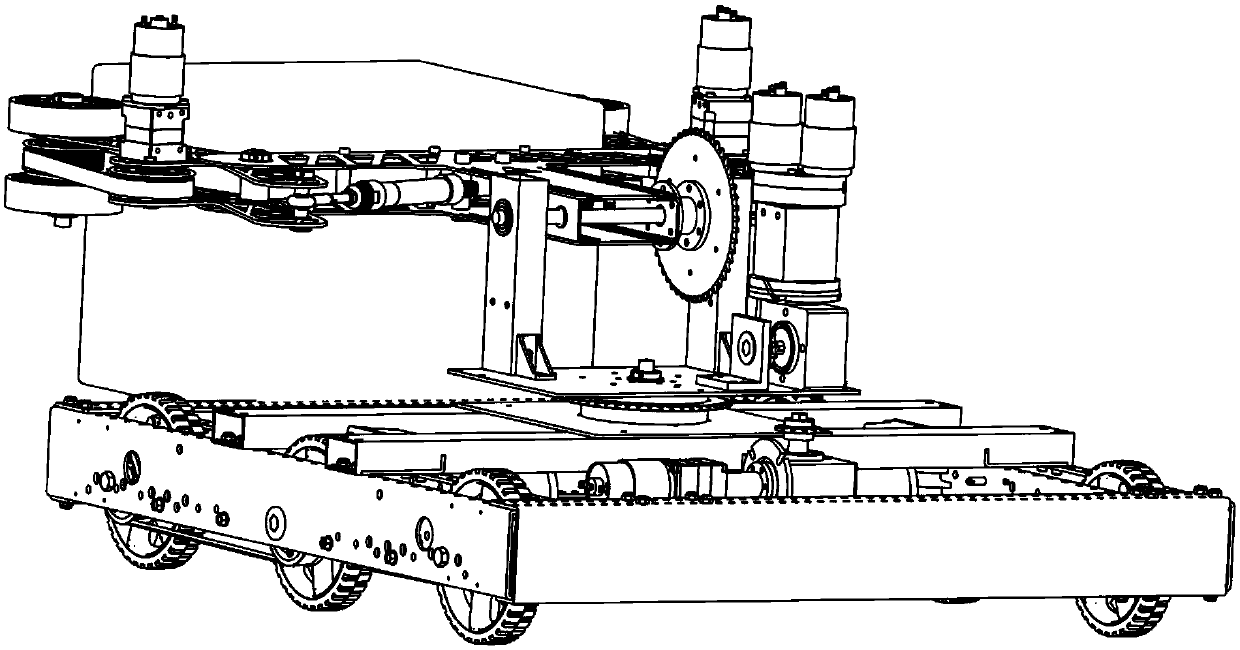
[0024] Such as figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 , the present invention proposes an air pump telescopic space flip grab walking robot, including up and down flip grab mechanism 1, space flip sub-mechanism 2, walking robot chassis 3, space flip sub-mechanism 2 is co-located above the walking robot chassis 3 , the up and down flip grabbing mechanism 1 is coupled to the space flipping sub-mechanism 2 .
[0025] As a preferred embodiment, the space inversion sub-mechanism 2 is provided with a longitudinal inversion pair 216 , and the input end of the up and down inversion grasping mechanism 1 is coupled with the space inversion sub-mechanism 2 through the longitudinal i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More