

A method for motion planning of a mechanical arm, a mechanical arm, and a robot
A motion planning and robotic arm technology, applied in the directions of manipulators, program-controlled manipulators, instruments, etc., can solve the problems of robot damage, jitter, affecting the effect of robot motion, etc., and achieve the effect of continuous and stable motion and preventing jitter.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
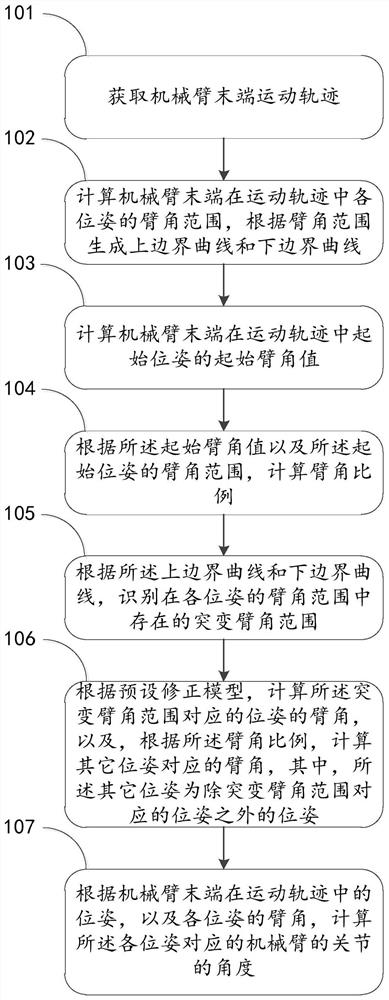
[0032] see figure 1 , figure 1 It is a flow chart of an embodiment of a method for manipulator motion planning in the present invention, and the method includes:
[0033] Step 101: Obtain the motion trajectory of the end of the mechanical arm;
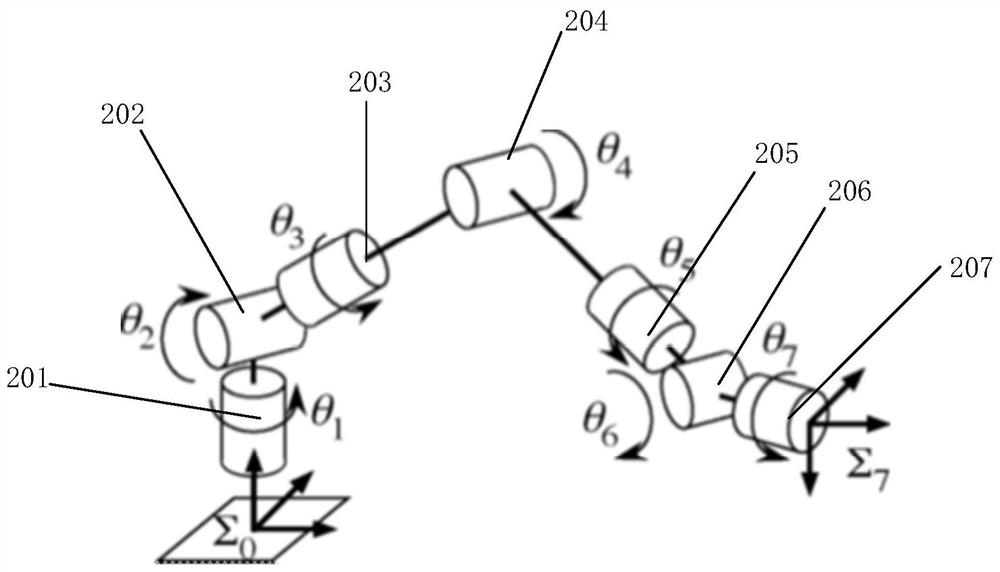
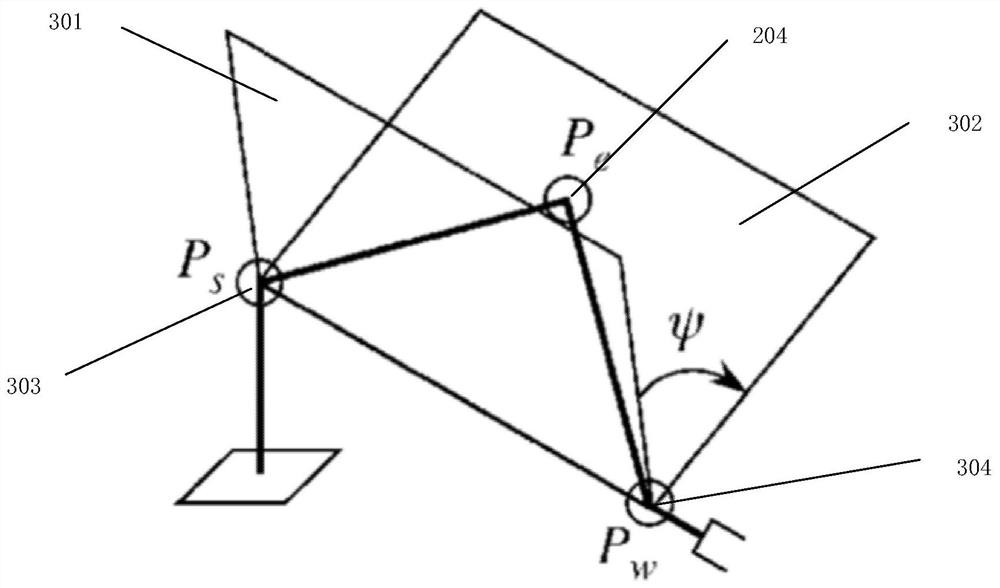
[0034] The robotic arm is composed of multiple joints, and the rotation of the robotic arm can be realized through the linkage between the joints. The arm angle refers to the angle at wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More