

A small-diameter pipe inner wall spraying robot and its control method
A spraying robot, small-caliber technology, applied in manipulators, manufacturing tools, spraying devices, etc., can solve the problems of poor continuity and stability, low efficiency, difficult control, etc., to ensure continuity and stability, improve Operational efficiency and the effect of ensuring adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
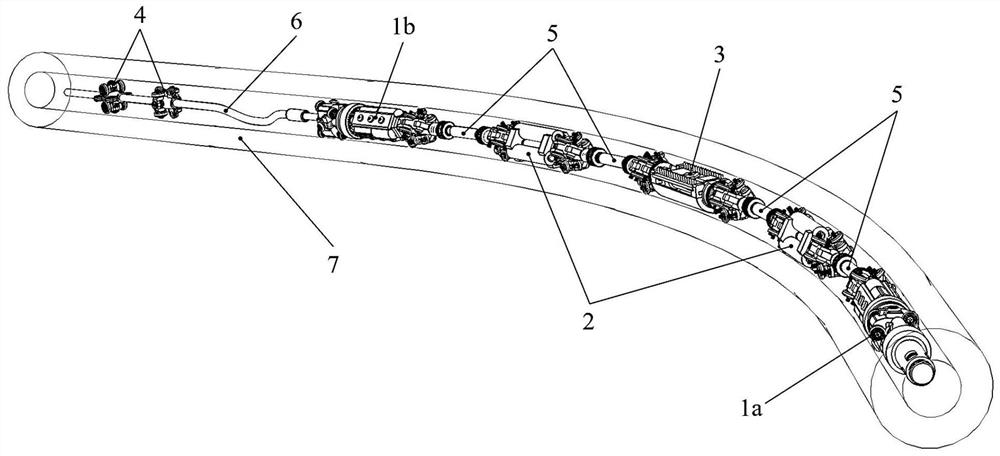
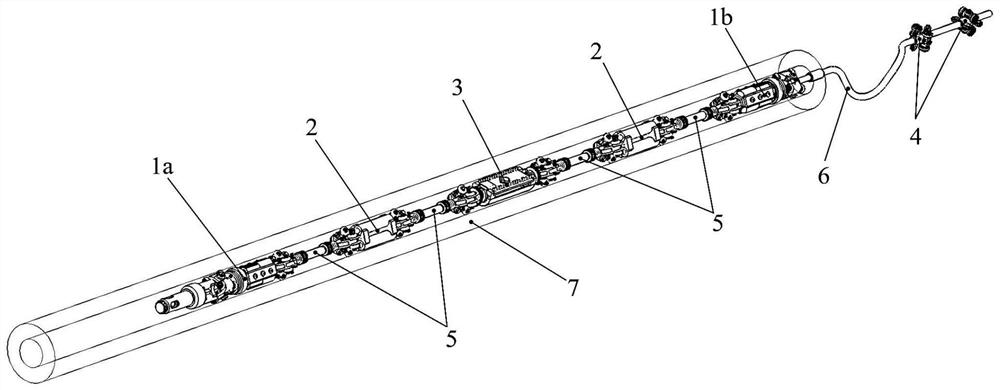
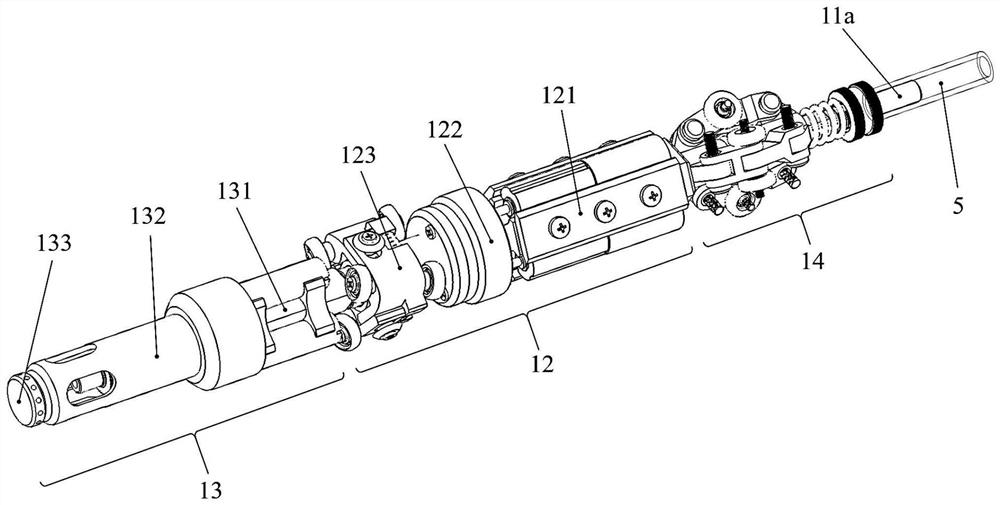
[0056] A small-diameter pipeline inner wall spraying robot, comprising a drive module, a power module, a control module, a feeding pipe support module, a feeding pipe and a hose connector; the driving module includes two types of a first driving module and a second driving module, Taking the first drive module as an example, the first drive module is composed of the first drive module main shaft, the screw drive assembly, the nozzle assembly, and the support assembly. The screw drive assembly includes a drive unit A, a rotating frame, and a screw reducing mechanism. The rotating frame will drive The driving force generated by unit A is transmitted to the helical reducing mechanism, which can be adaptively adjusted with the pipe diameter, and its driving wheel always presses the inner wall of the small-diameter pipe to be sprayed. While ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More