

Flexible snakelike arm with variable rigidity
A variable stiffness and software technology, applied in the field of robotic arms, can solve the problems of low end precision, the gap between output precision and application requirements, and achieve the effect of improving motion precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
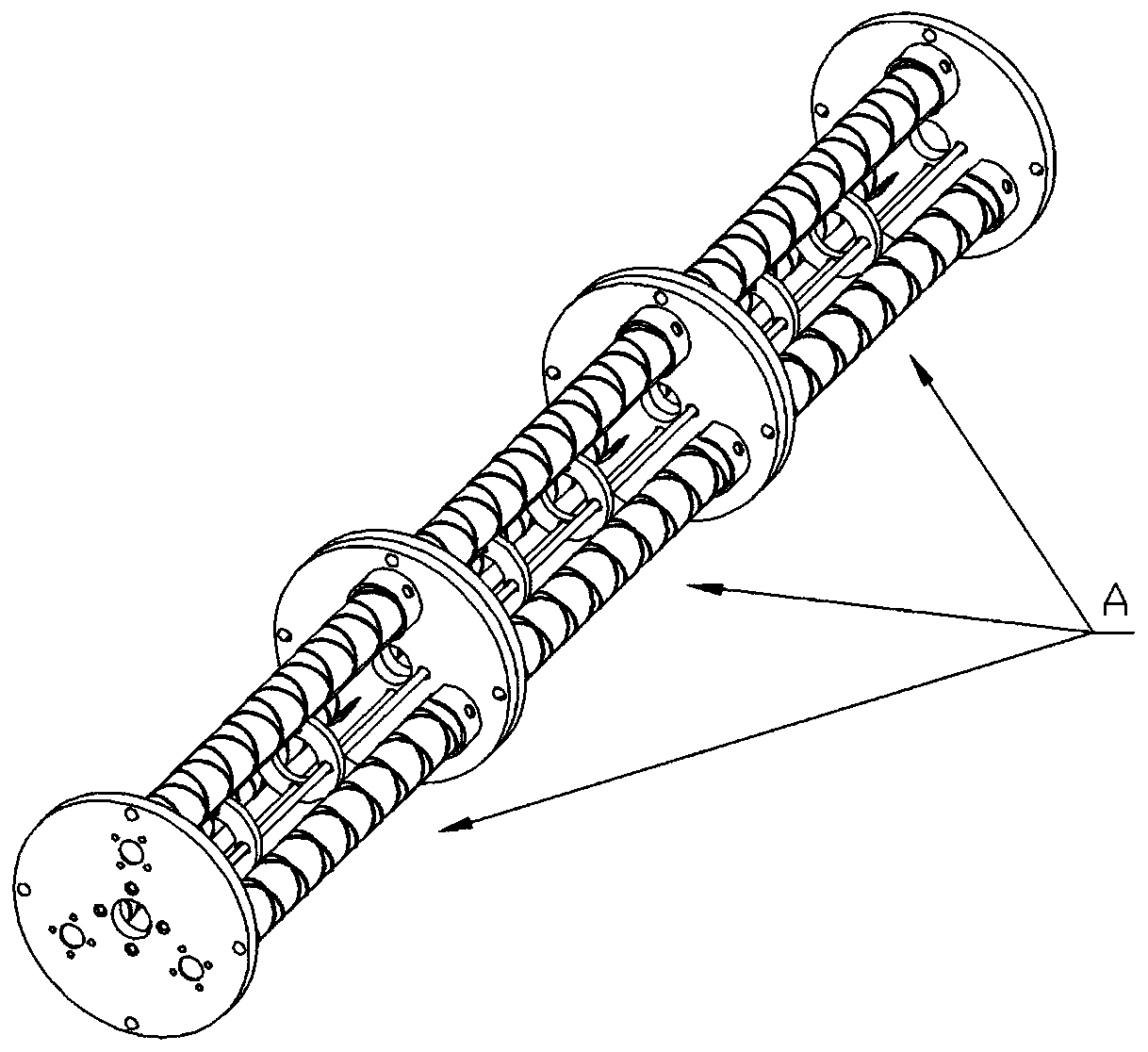
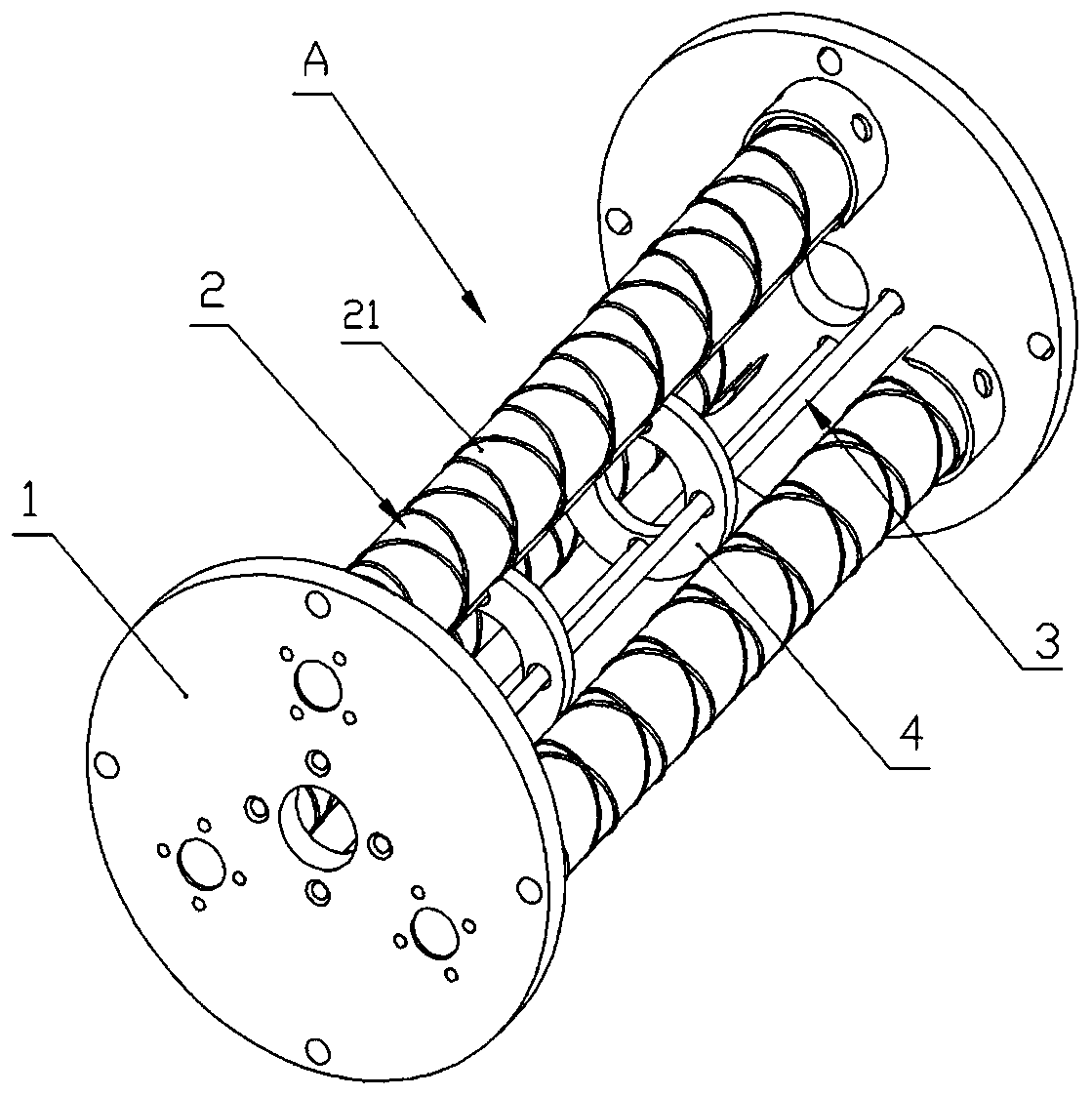
[0027] Such as figure 1 As shown, the variable stiffness soft serpentine arm provided in this embodiment includes several rigid-flexible units A that are detachably connected as one; figure 2 As shown, the rigid-flexible unit A includes a rigid end plate 1 , a soft pneumatic artificial muscle group 2 , a superelastic multi-rod mechanism 3 and a spacer 4 .
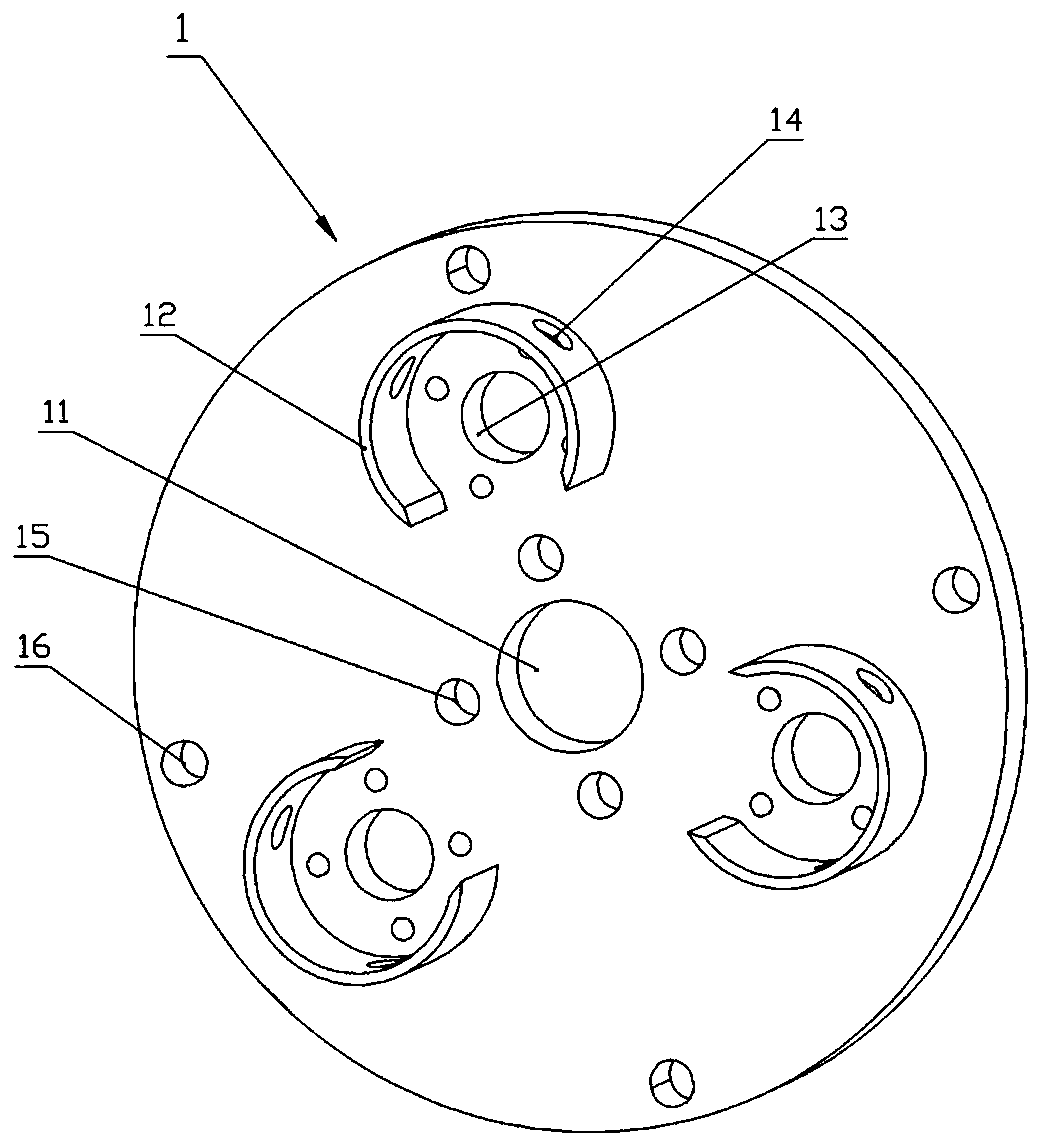
[0028] Such as figure 2 , image 3 As shown, the rigid end plate 1 is a ring plate, and a through hole 11 is provided at the axial center for the passage of air ducts and cables while reducing its own weight; The three mounting seats 12, the mounting seat is an annular seat that is not closed in the radial direction, and the plate body in the mounting seat is provided with a reserved hole 13, the reserved hole is reserved for installing the sensor and can reduce the weight at the same time. A pair of mounting holes 14 are provided, and one end of the mounting seat is fixedly connected to the rigid end plate, and the mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More