

Multi-unmanned aerial vehicle collaborative searching method based on improved pigeon flock optimization
A multi-UAV, search method technology, applied in artificial life, two-dimensional position/channel control, instruments, etc., can solve the problems of low static efficiency of search targets, repeated searches, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
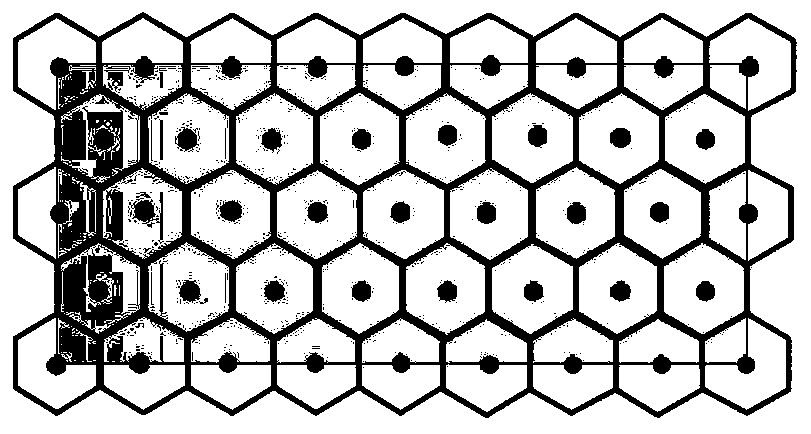
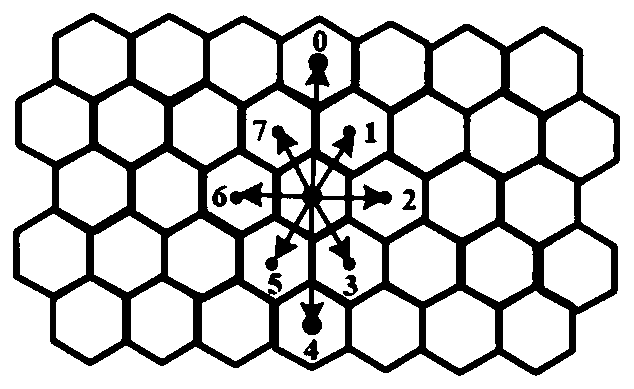
[0095] first figure 2 is the modeling of the search environment, the search area L is divided into 10*10 grids, image 3 For the flight model of the UAV, due to the limitation of the minimum turning diameter, it can only reach the front, left and right directions of the flight direction, and the Markov model is used to establish the dynamic target.
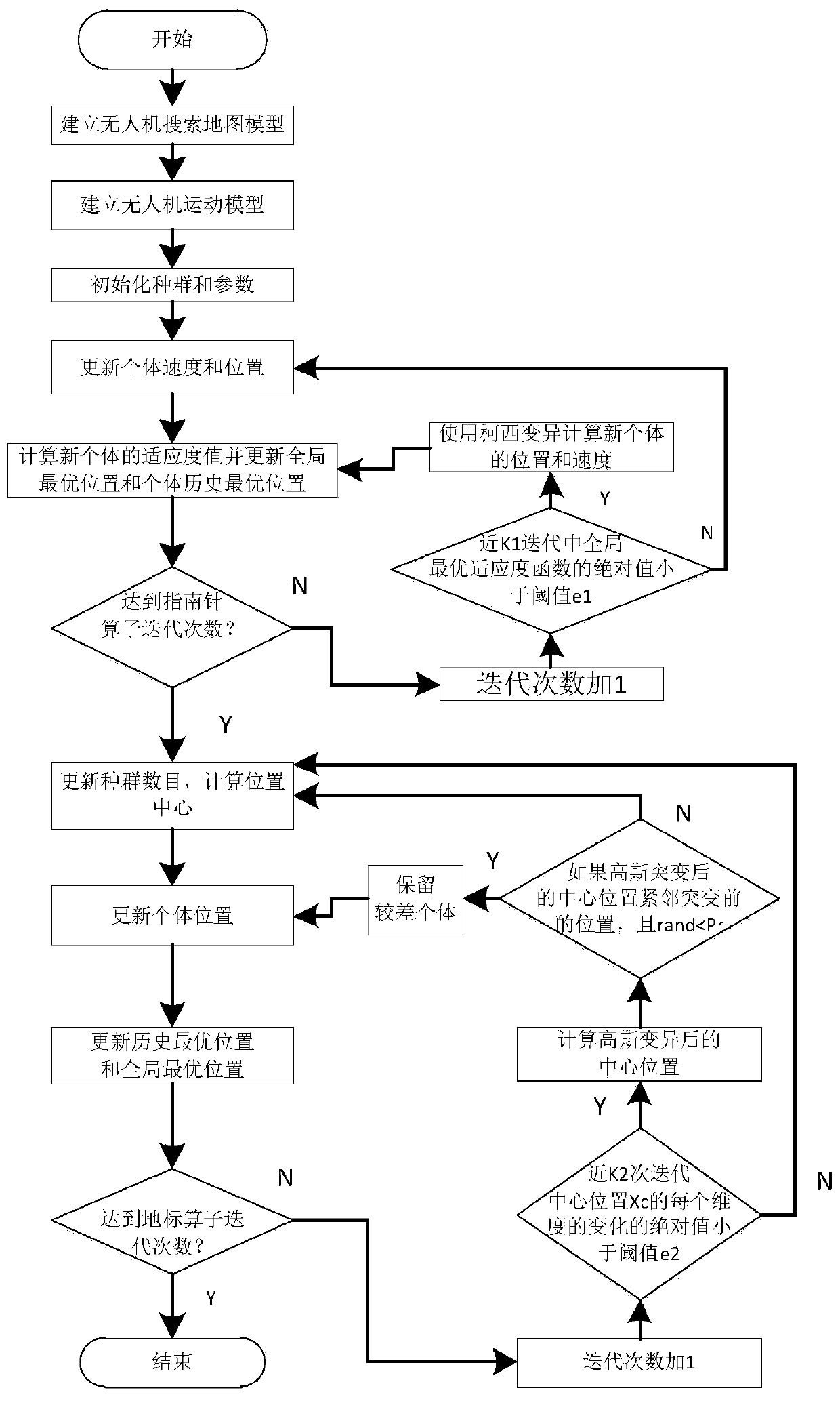
[0096] Then start the multi-UAV search, set the total number of pigeons N to 50, and the number of iterations of the compass operator to be N c 1 is 15, the number of iterations of the landmark operator is N c 2 is 5. In the iterative stage of the compass operator, the initial individual position and velocity are calculated first, and the historical optimal position and the global optimal position of the individual are recorded. If it is close to K 1 = The value of the global optimal fitness function in 3 iterations is less than the threshold e 1 =0.1, then carry out Cauchy mutation, where Cauchy distribution probability dens...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More