

A Robot Target Trajectory Accuracy Compensation Method for Industrial Measurement
A target trajectory and industrial measurement technology, applied in the field of robotics, can solve problems such as space coordinate measurement value deviation, measurement data overall deviation, and affecting detection accuracy, and achieve the effect of improving measurement positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below with reference to specific examples and accompanying drawings.
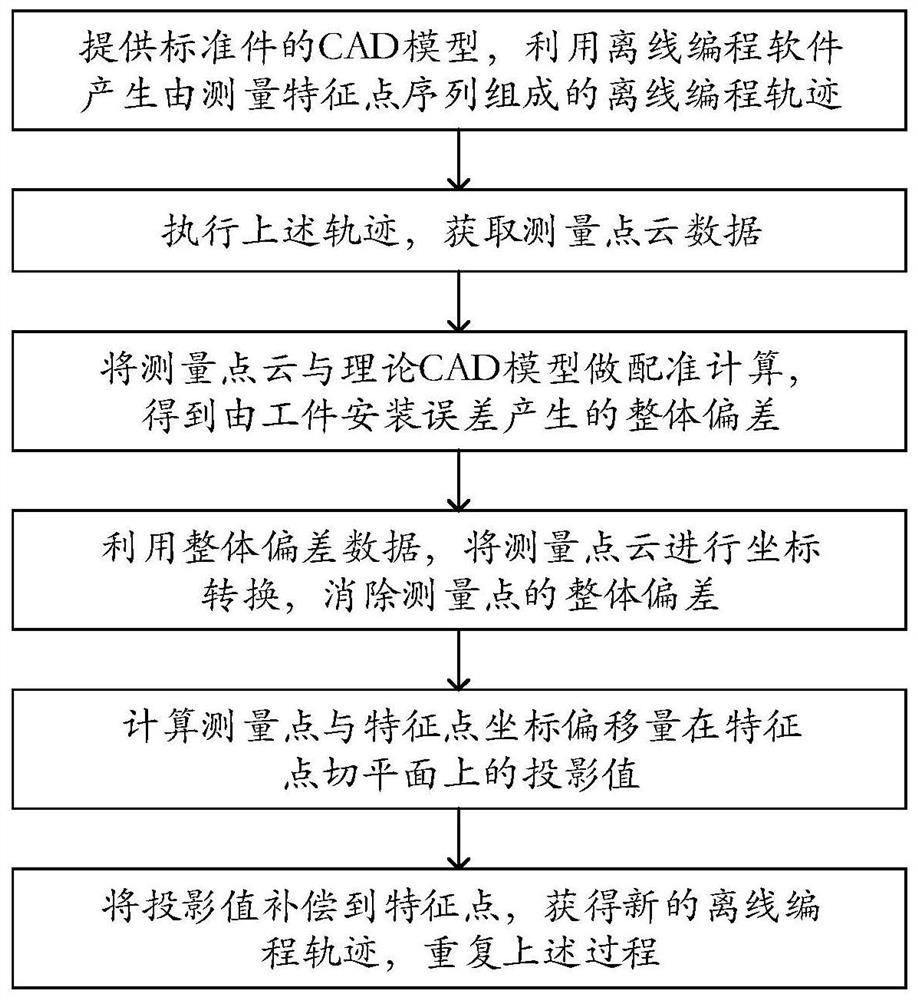
[0033] like figure 1 As shown, the present invention provides a robot target trajectory accuracy compensation method for industrial measurement, comprising the following steps:
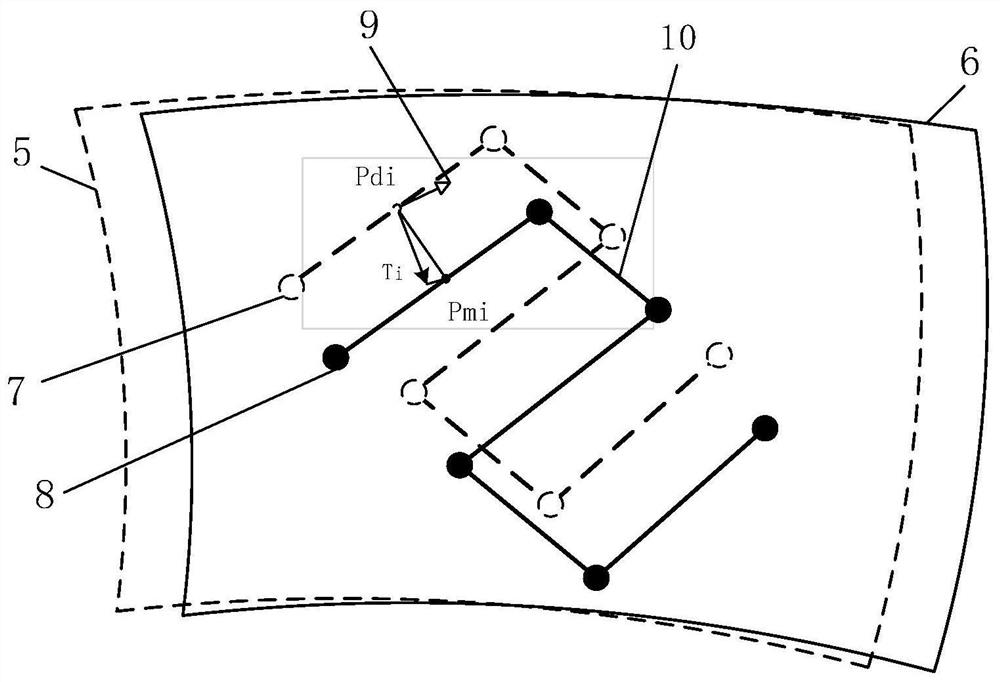
[0034] Step 1: Provide the CAD model of the standard part according to the detection process requirements (the actual product shape is consistent with the CAD model), and then use the offline programming software to generate an offline programming track consisting of a sequence of measured feature points {P d_i }.
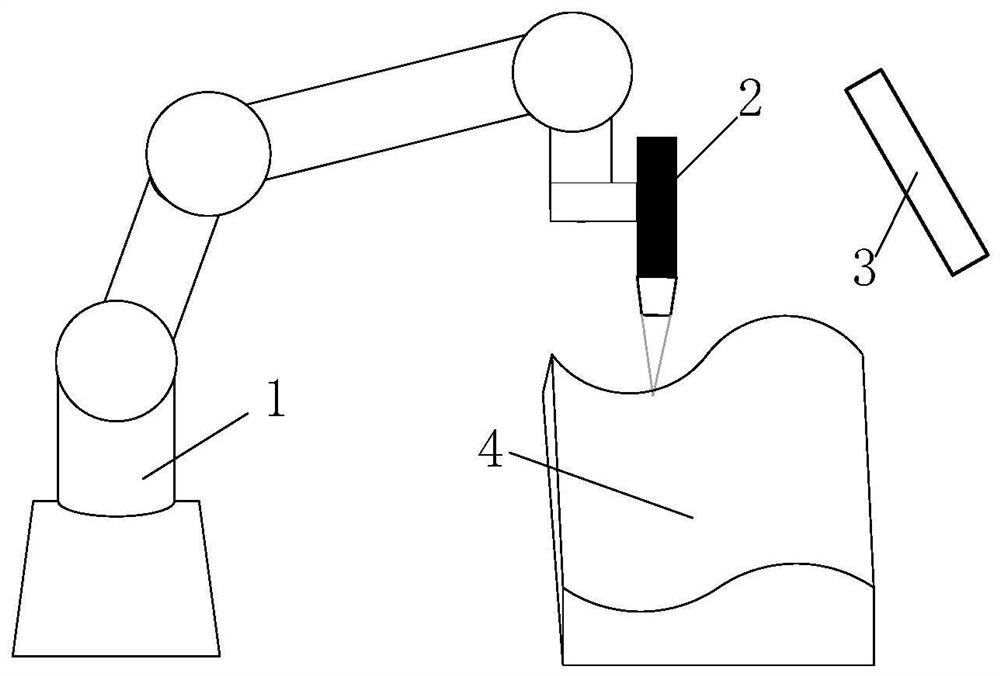
[0035] Step 2: In the measurement station, transmit the trajectory generated in step 1 to the robot control unit, control the robot to execute the trajectory, and obtain the measurement point cloud data (actually an ordered measurement point set) {P m_j }; During the movement of the robot, when the robot executes the measurement command of the point to be measured...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More