

Design method for marine robot trajectory tracking control structure
A design method and trajectory tracking technology, applied in the direction of non-electric variable control, control/adjustment system, two-dimensional position/channel control, etc., can solve the problems of cumbersome process, large calculation burden of control system, and many manual adjustment parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
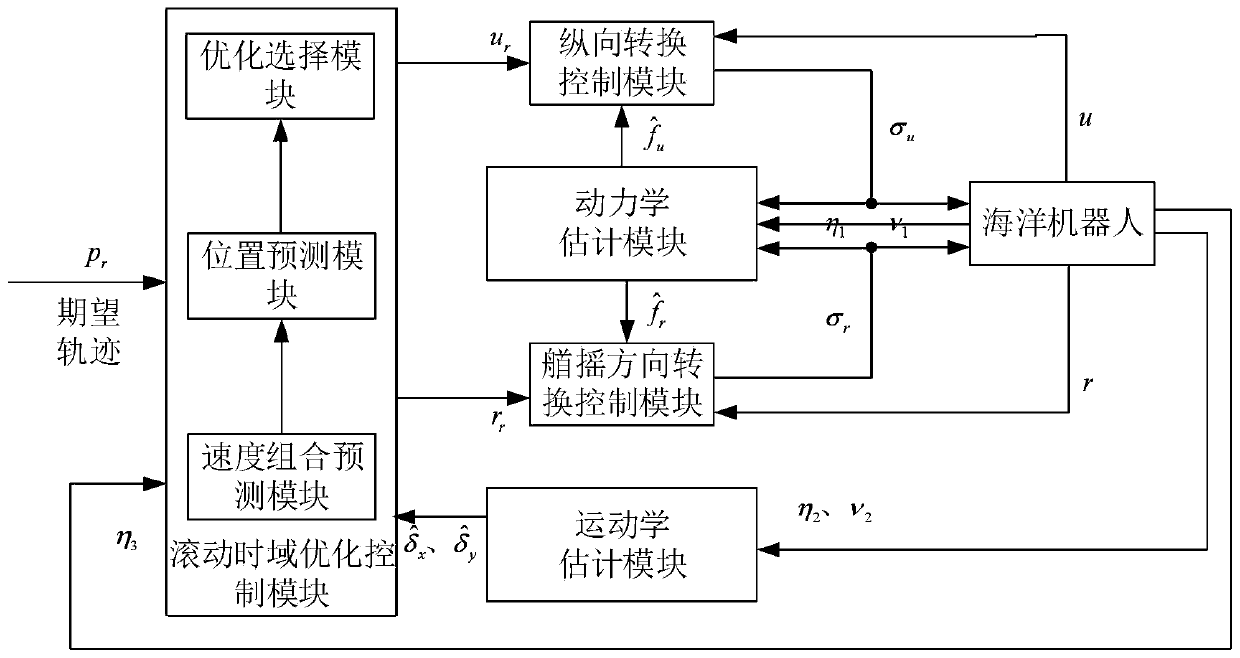
[0086] The present invention will be further described below in conjunction with the accompanying drawings. figure 1 It is a structural schematic diagram of the present invention, and the marine robot meets the dynamic model in formula (1) in the marine robot trajectory tracking control system, and the specific parameters of the model are as follows:
[0087]
[0088]
[0089] Among them, the input voltage signal σ u , σ r and moment τ u , τ r The relationship between is:
[0090]
[0091] The initial position of the marine robot is:
[0092]
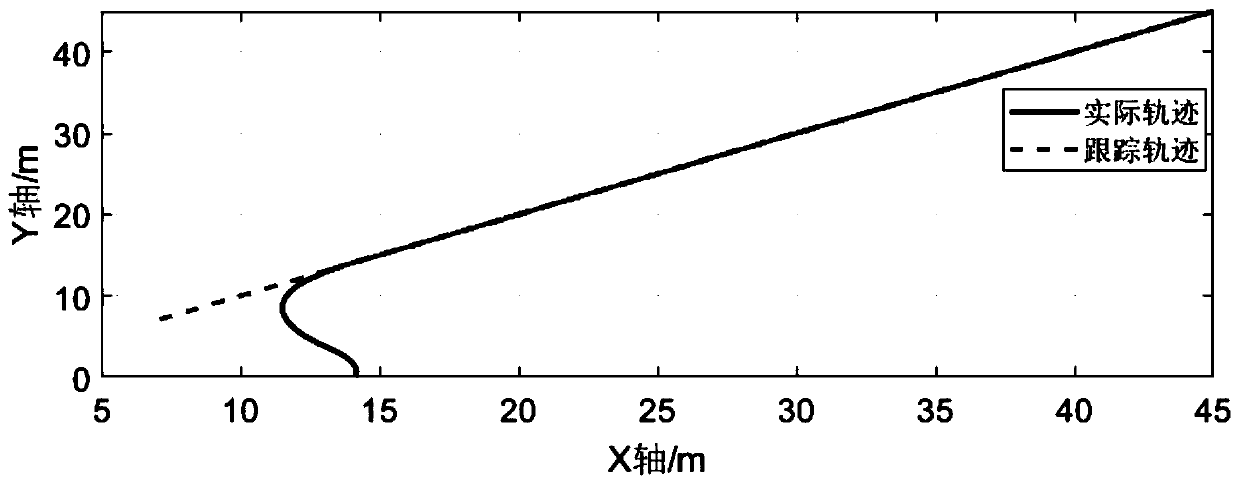
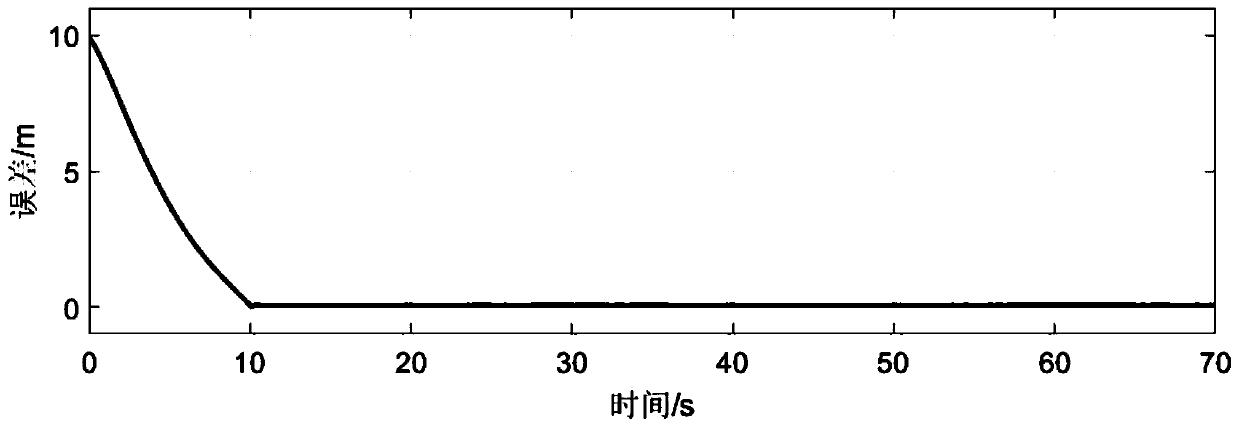
[0093] In this embodiment, the control target of the trajectory tracking control structure of the marine robot is to ensure that the marine robot can accurately track the trajectory of the target, and its specific parameters are as follows: the position of the reference virtual target trajectory is The control input is 0≤u≤1.5, -0.3≤r≤0.3, the sampling time T=0.1, and the number of prediction steps n=1.
[0094] The s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More