

Robot control method
A robot and walking technology, applied in the field of intelligent robots, can solve the problems of long repeated cleaning time, low coverage rate, unable to achieve cleaning effect, no space planning, etc., to achieve the effect of improving cleaning coverage rate and avoiding repeated coverage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Nowadays, the application level of automatic mobile robots is getting wider and wider, and the robots used for sweeping the floor have penetrated into the home and become a new generation of white goods. This proposal proposes a method of controlling robot sweeping, which can quickly increase the cleaning rate coverage of the space. In order to make the content of the present invention clearer, the following specific examples are given as examples in which the present invention can actually be implemented.
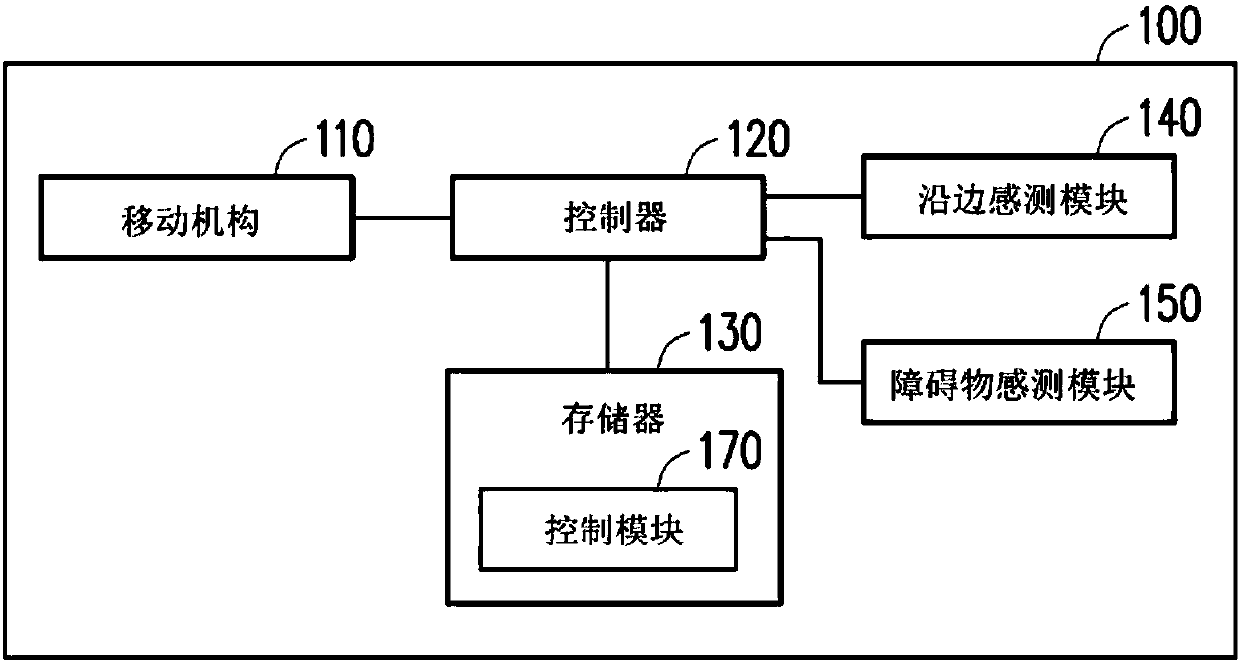
[0039] figure 1 is a block diagram of a robot 100 according to an embodiment of the present invention. Please refer to figure 1 , the robot 100 includes a moving mechanism 110 , a controller 120 , a memory 130 , an edge sensing module 140 and an obstacle sensing module 150 . The controller 120 is coupled to the moving mechanism 110 , the memory 130 , the edge sensing module 140 and the obstacle sensing module 150 .
[0040] The moving mechanism 110 is, for examp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More