

Self-positioning error elimination method for closed-loop detection robot based on effective key frame
A closed-loop detection and error elimination technology, applied in instruments, adaptive control, control/regulation systems, etc., can solve the problems of SLAM effective key frame loss and high algorithm complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
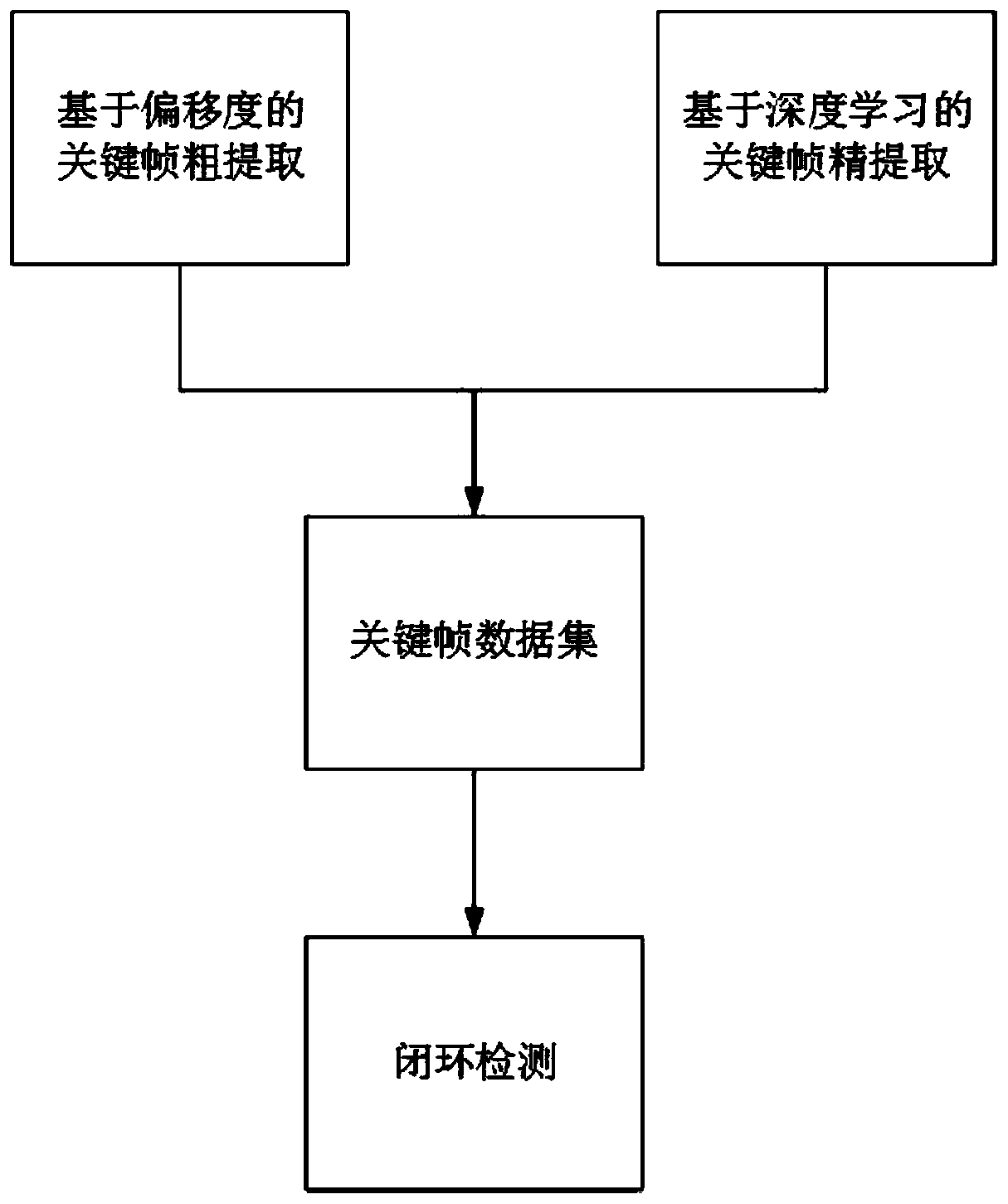
[0048] Such as figure 1 As shown, the closed-loop detection based on effective key frames includes rough key frame extraction based on offset degree, combined with deep learning key frame fine extraction to generate an effective key frame set, and then performs historical loop closed detection based on the effective key frame set. Include the following steps:
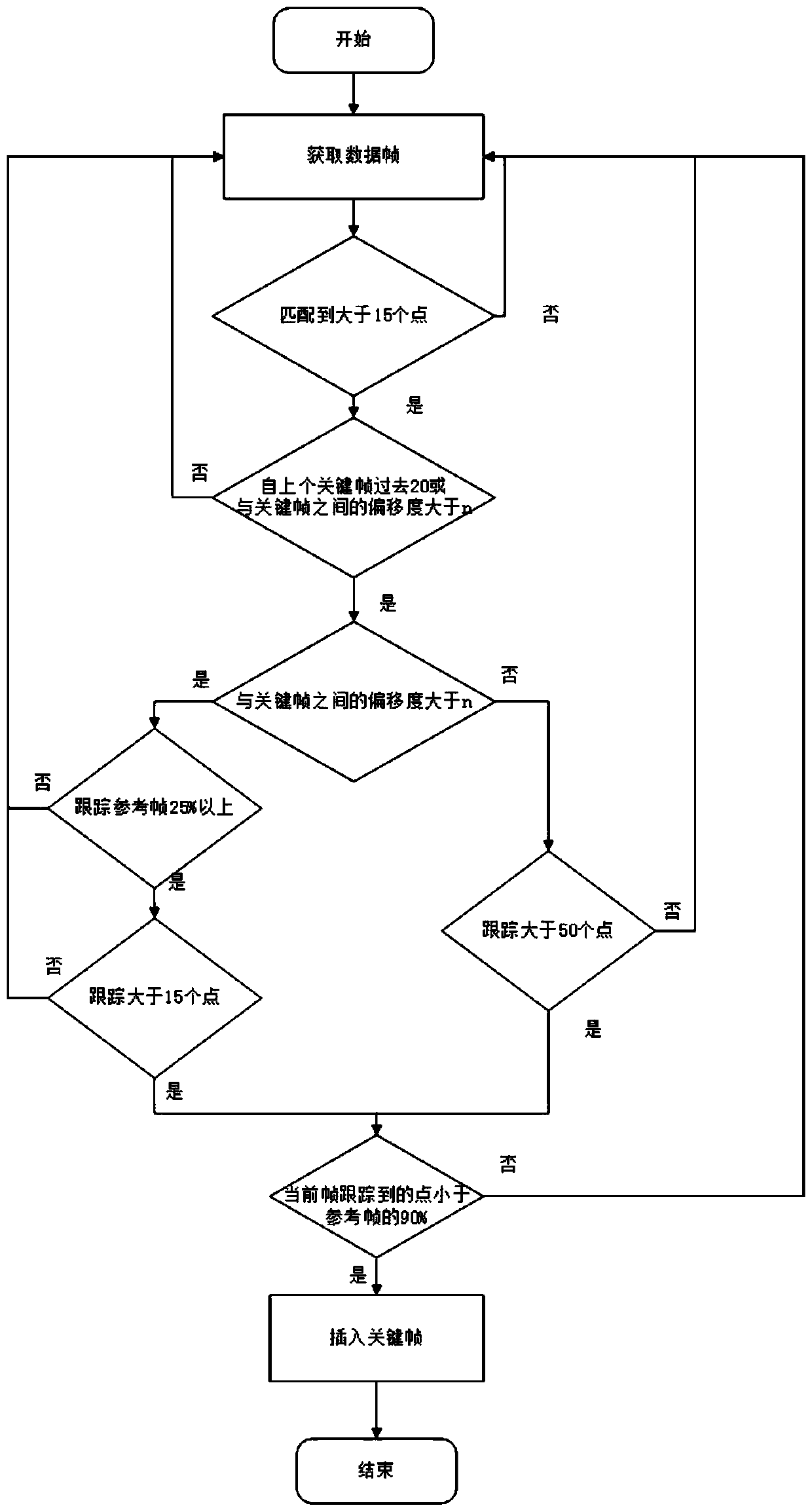
[0049] 1. Rough extraction of key frames based on offset, such as figure 2 shown.
[0050](1) Data frame extraction: ORB-SLAM (Oriented FAST and Rotated BRIEF-Simultaneous Localization And Mapping, ORB-based simultaneous positioning and map construction) is used to extract key frames. ORB-SLAM is a SLAM algorithm that uses the FAST algorithm to find key points, selects BRIEF as a descriptor, and extracts key frames.
[0051] (2) Determine whether the matching points are greater tha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More