

Soft robot active disturbance rejection control method based on dielectric elastomer actuator
A technology of dielectric elastic body and active disturbance rejection control, which is applied in the direction of piezoelectric effect/electrostrictive or magnetostrictive motors, generators/motors, electrical components, etc., can solve the problems of few research results and reduce the Input Signal Requirements, Effects of Enhanced Robustness and Adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0035] 1. General description of the technical scheme of the present invention
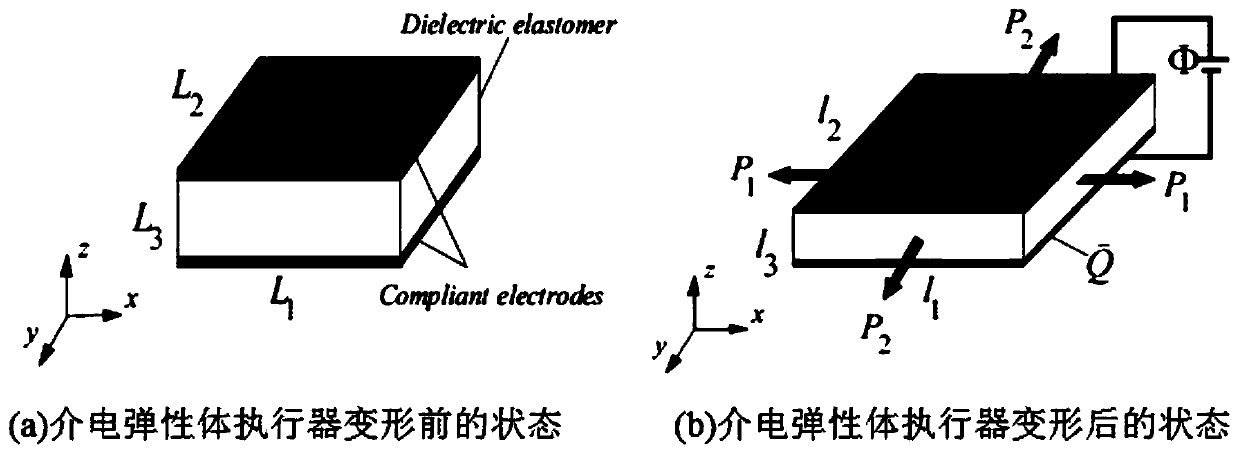
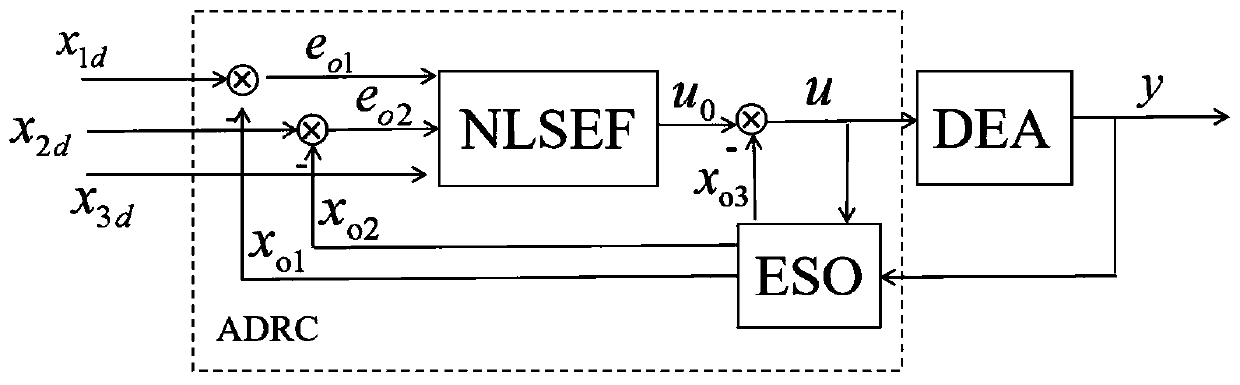
[0036] In the present invention, a trajectory tracking controller is designed for a soft robot based on a dielectric elastomer actuator by using the active disturbance rejection control technology. First, based on the virtual work simulation method, the Gent model is used to describe the elastic energy, and a dynamic control model of the dielectric elastomer actuator is established. Second, because some model parameters of the dielectric elastomer actuator are difficult to obtain, and the dielectric elastomer The deformation rate of the actuator is difficult to measure by the sensor. Therefore, using the output measurement value of the dielectric elastomer actuator as the input signa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More