

Flexible mechanical arm synchronous measurement method, system and device
A flexible manipulator and synchronous measurement technology, applied in the field of visual measurement, can solve the problems of unclear multi-level coupling mechanism of motion accuracy, difficult modeling of flexible manipulators, poor motion accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0043] Embodiment 1 of the present invention provides a flexible robotic arm synchronous measurement device, and this embodiment is applicable to the field of synchronous measurement of the shape of the flexible robotic arm and the terminal position and posture.
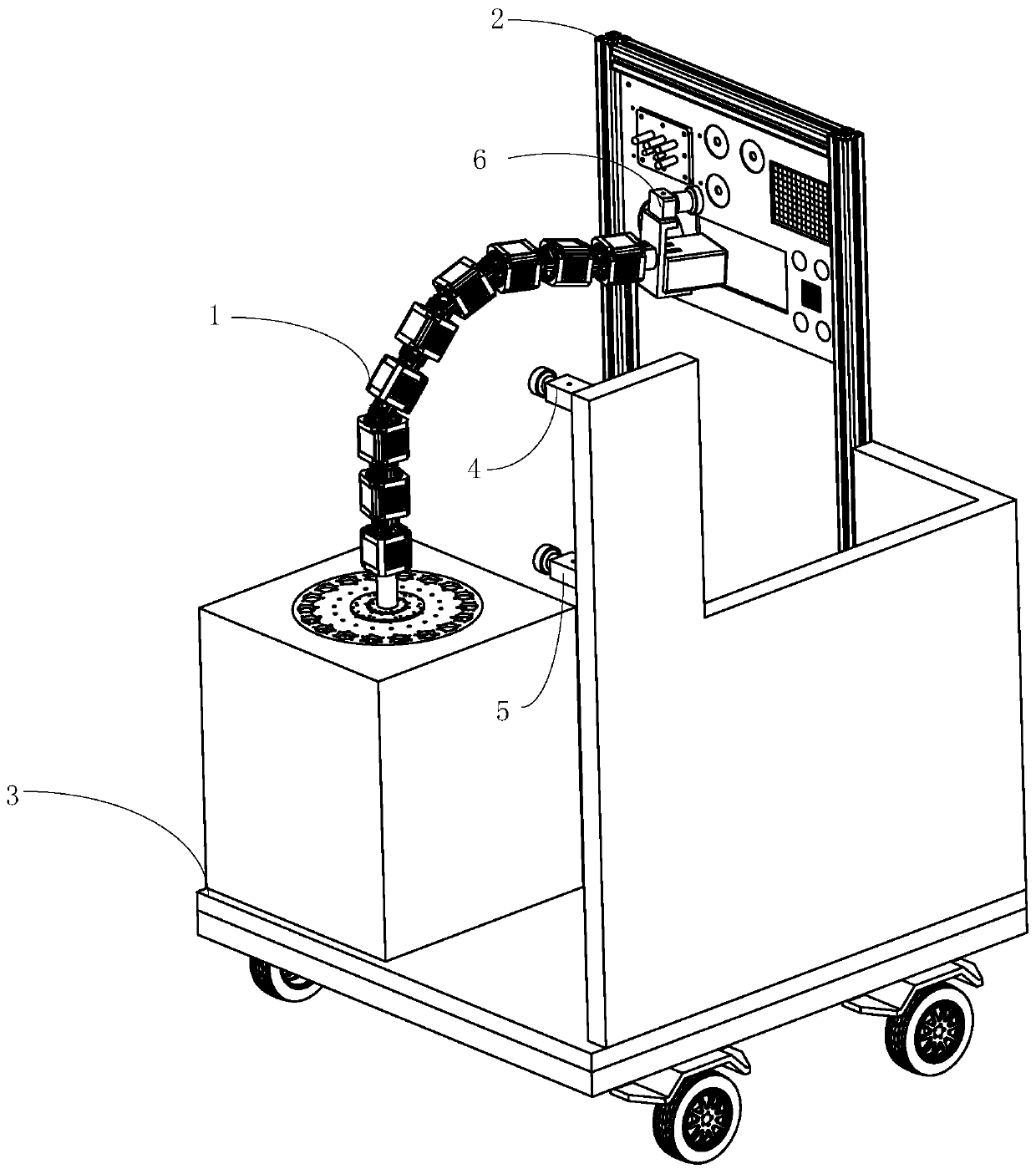
[0044] see figure 1 , figure 1 It is a schematic structural diagram of a synchronous measurement device for a flexible robotic arm provided by an embodiment of the present invention. like figure 1 As shown, the synchronous measurement device of the flexible robotic arm 1 includes: the flexible robotic arm 1, the task board 2, the mobile base 3, the first global camera 4, the second global camera 5, a microprocessor (not shown); the flexible mechanical arm The arm 1 is set on the mobile base 3; the flexible mechanical arm 1 is provided with a plurality of rotating joints and the end device of the mechanical arm, and the surfaces of the rotating joints and the end device of the mechanical arm are provided with a two-...
Embodiment 2
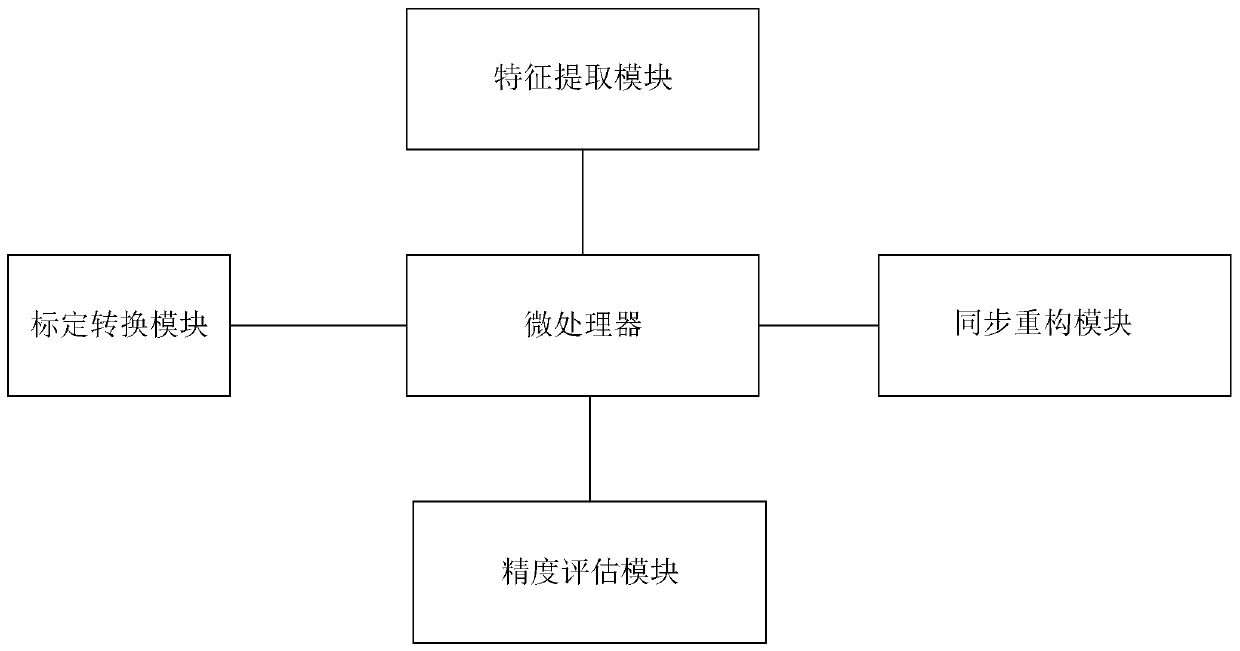
[0049] Embodiment 2 of the present invention provides a synchronous measurement system of a flexible manipulator. This embodiment is applicable to the field of synchronous measurement of the shape of the flexible manipulator and the position and posture of the end of the flexible manipulator. The synchronous measurement system includes a feature extraction module, a calibration conversion module, a synchronous reconstruction module, and an accuracy evaluation module.
[0050] The feature extraction module is used to perform steps to obtain typical feature information of each joint segment and end of the flexible manipulator;
[0051] The calibration conversion module is used to obtain the relative pose relationship of the base, the rotation center of each joint and the end of the flexible manipulator through the coordinate system conversion in the execution step;
[0052] The synchronous reconstruction module is used to obtain the position and orientation information of each r...
Embodiment 3
[0056] Embodiment 3 of the present invention provides a method for synchronous measurement of a flexible manipulator. This embodiment is applicable to the field of synchronous measurement of the shape of the flexible manipulator and the position and orientation of the end of the flexible manipulator.
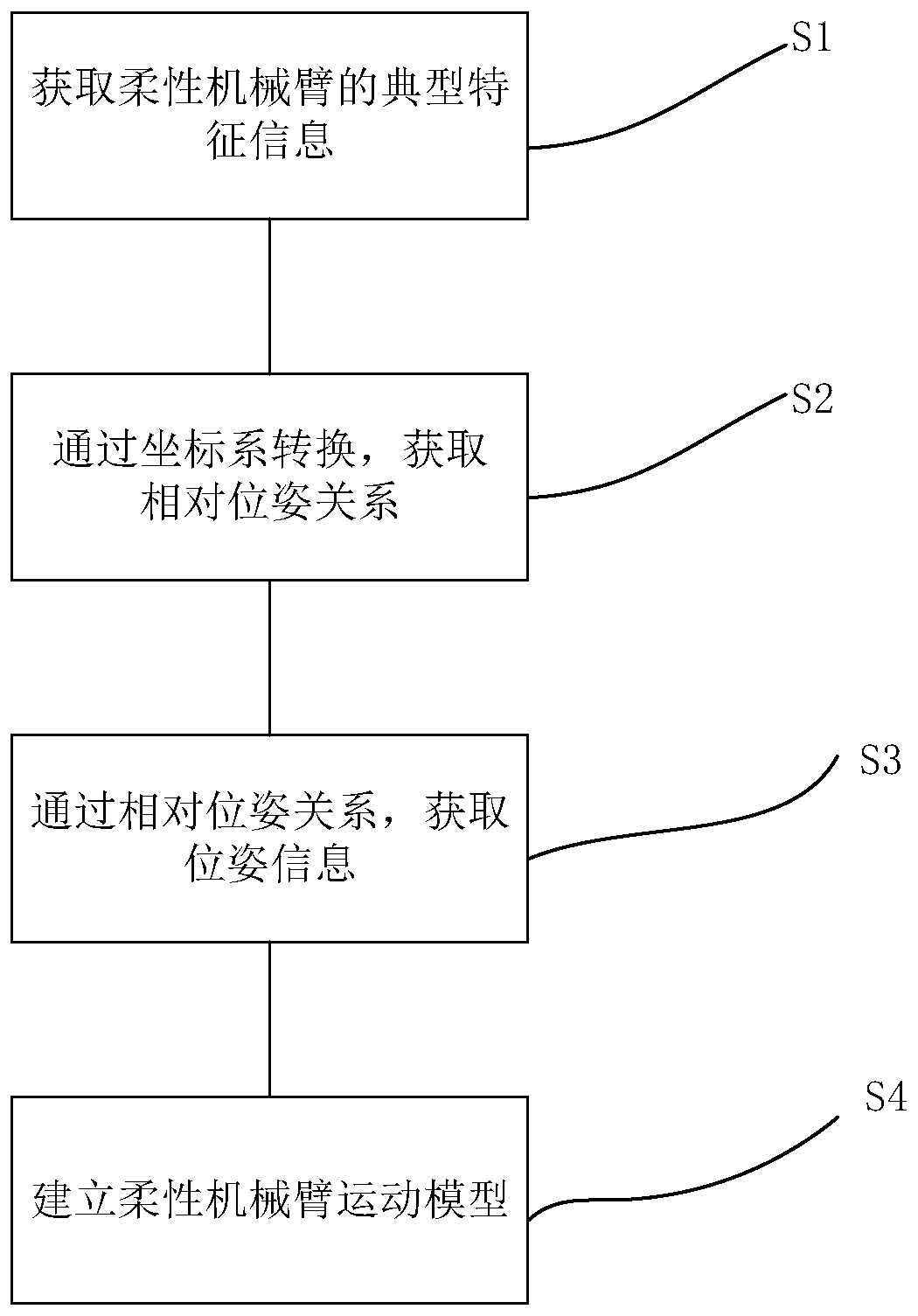
[0057] Please also refer to figure 1 , image 3 , image 3 It is an implementation flowchart of a method for synchronous measurement of a flexible robotic arm provided by an embodiment of the present invention. Embodiment 3 is described in detail in conjunction with Embodiment 1. The method mainly includes the following steps:
[0058] S1: Obtain typical characteristic information of the flexible manipulator;
[0059] S2: Obtain the relative pose relationship of the base, the rotation center of each joint, and the end of the flexible manipulator through coordinate system transformation;
[0060] S3: Obtain the pose information of each rotating joint and end of the flexible m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More