

A Frame Angular Velocity Determination Method for sgcmg
A technology for determining the method and frame angle, which is applied in the directions of space navigation equipment, space navigation aircraft, space navigation equipment, etc. It can solve the problems of instability of the singular state system and the loss of attitude maneuverability of satellites, and achieve high-performance attitude control. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
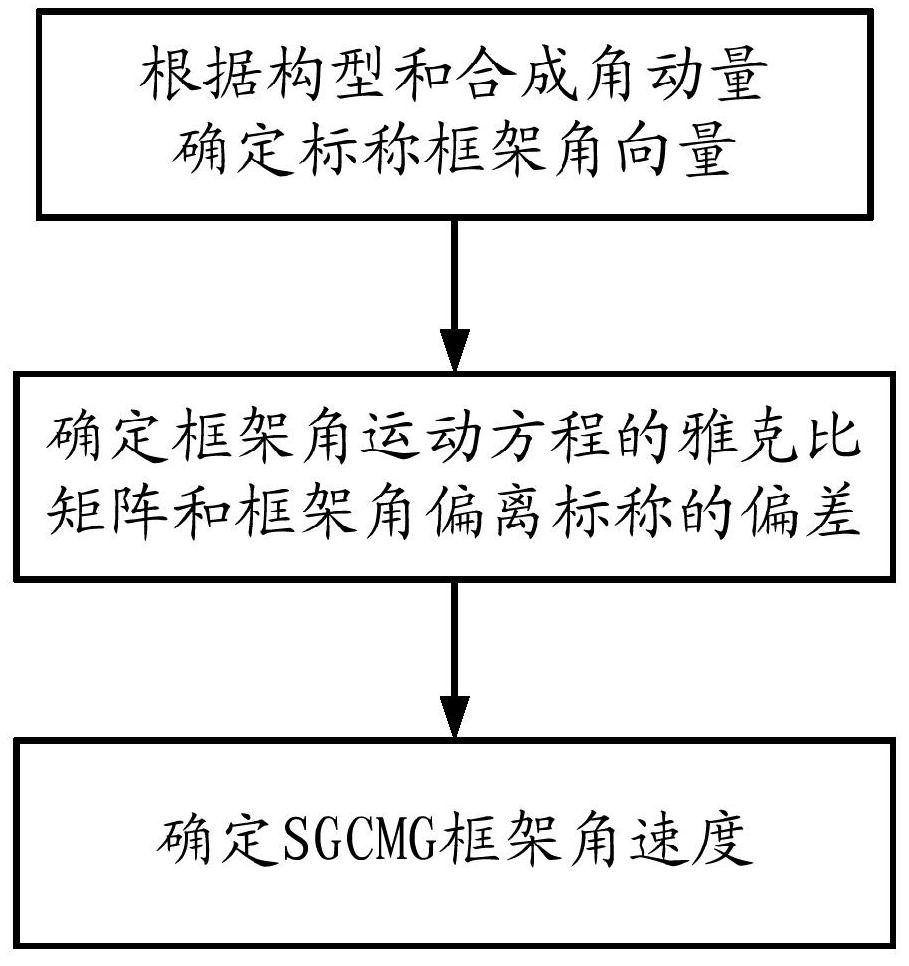
[0045] Embodiment 1: For the satellite of the CMG group that 3 high-precision star sensors, 6 high-precision gyroscopes, and 6 pentagons are installed, record each CMG label as CMG1, CMG2, CMG3, CMG4, CMG5, CMG6. A multi-objective optimization control law of SGCMG system, according to figure 1 The method flow chart, the specific implementation is as follows:
[0046] 1) All CMGs work normally during the initial operation of the satellite, and the nominal frame angle δ is selected for this combination CMG0 =[88.03; -92.32; -92.41; 60.740591; -116.144; -145.265], so that under this configuration, the three-axis synthetic angular momentum H is zero, the singularity JD = 7.299, and the torque output capability of CMG in each direction is equivalent.
[0047] 2) When the satellite runs to 2000 seconds, CMG1, CMG2, and CMG5 fail, and the rest of the CMGs work normally. In this combination, select the nominal frame angle δ CMG0 =[0; 0; 242.2276997; 297.7723; 0; 270], so that under ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More