

A Method for Determining Angular Velocity of SGCMG Dynamic Frame Adapted to Attitude Redirection
A method for determining the frame angle, which is applied in attitude control, non-electric variable control, vehicle position/route/altitude control, etc. It can solve the problem that the satellite loses attitude maneuverability, the spacecraft channel attitude is out of control, and the frame angle cannot return to the original status, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0053] For the satellites of the SGCMG group installed with 3 high-precision star sensors, 6 high-precision gyroscopes, and 6 pentagonal pyramids, record the labels of each SGCMG as CMG1, CMG2, CMG3, CMG4, CMG5, and CMG6, of which CMG5 and CMG6 have failed , CMG1, CMG2, CMG3, CMG4 participate in attitude control. Adopt the inventive method to be specifically implemented as follows:
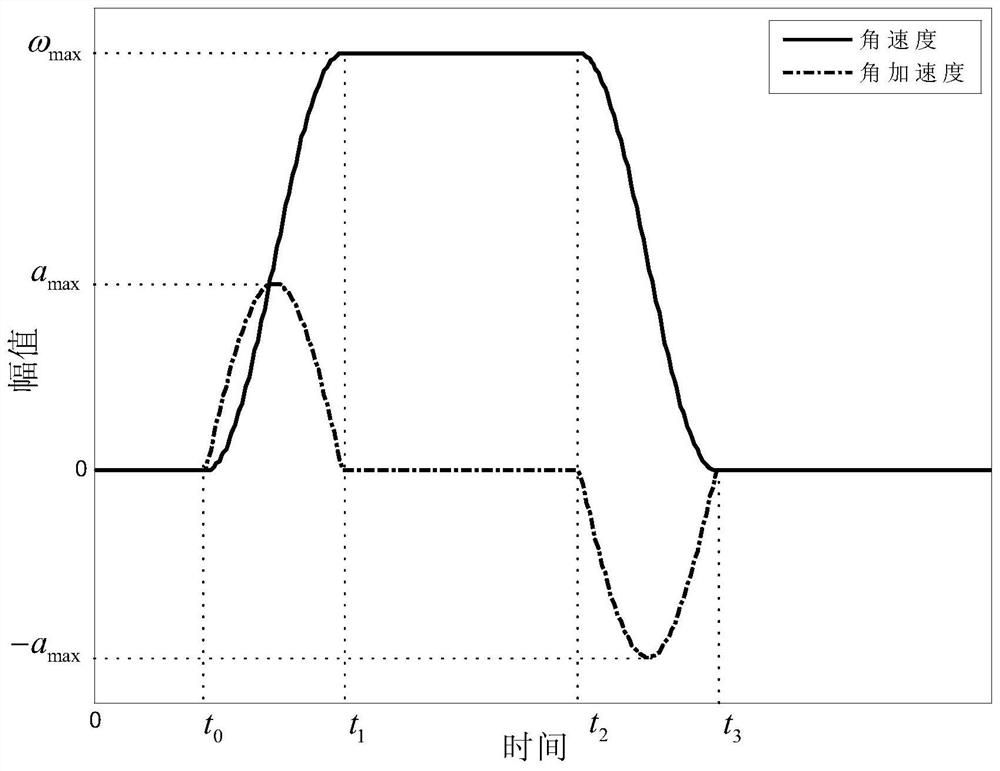
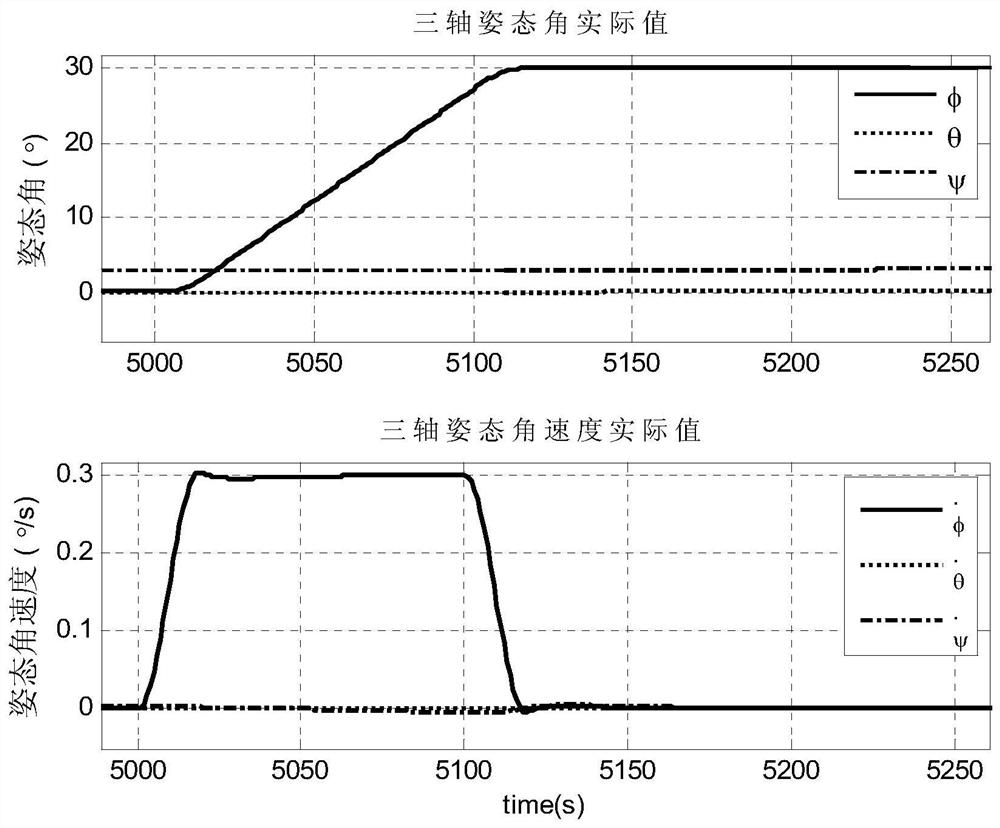
[0054] 1) Design acceleration sinusoidal trajectory planning, the maximum angular acceleration of attitude maneuver is taken as 0.025deg / s 2 , the maximum maneuvering angular velocity is taken as 0.3deg / s, and the attitude control bandwidth is taken as 0.008Hz. When the satellite runs to 5000 seconds, the injection roll axis maneuvers 30 degrees, then the end time t along the acceleration segment can be obtained 1 =5018.6, end time t of constant velocity section 2 =5099.9, the end time of the deceleration section t 3 = 5118.6.
[0055] 2) Design parameter λ δ = 1.0,k α0 = 0.1, λ H = 0.1. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More