Upper limb motion adaptive power-assisted exoskeleton
An adaptive and exoskeleton technology, applied in the wearable field, can solve problems such as the inability of the human body to freely shoulder joints, and achieve the effects of reducing fatigue, ensuring reliability, and improving comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
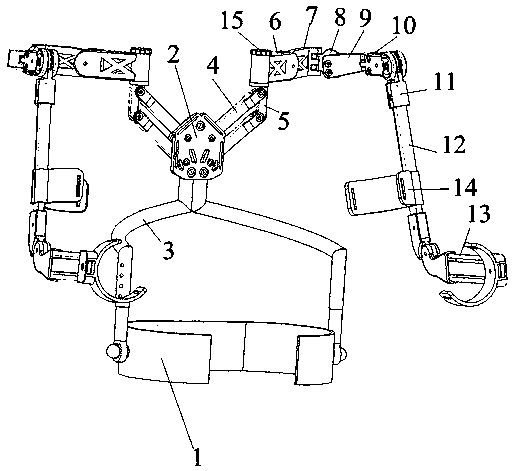
[0058] as attached figure 1 to attach image 3 As shown, an adaptive power-assisted exoskeleton for upper limb movement includes a back component and a waist component 1. Both sides of the back component are symmetrically provided with a shoulder component and an elbow component. Rotating member 5, first main rotating member 6, second main rotating member 7, horizontal circumferential block 8, shoulder lifting arm block 9 and shoulder circumferential block 10, the other end of inclined bar 4 connected to vertical rotating member 5 Tilt down and be connected with the back assembly in rotation, the other end that the shoulder circumference block 10 is connected with the shoulder lifting arm block 9 is in rotation connection with the elbow assembly, and one end of the oblique bar 4 is connected with the back assembly through the first transverse connector and can be rotated around The back assembly rotates up and down, one end of the vertical rotating member 5 is connected to th...
Embodiment 2
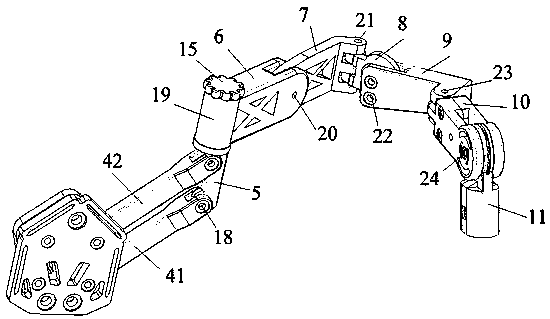
[0096] as attached Figure 8 And attached Figure 9 As shown, the difference between the second embodiment and the first embodiment is that: the end of the first main rotating member 6 facing the second main rotating member 7 is vertically provided with a first groove, and the first groove is vertically provided with a penetrating The first vertical mounting hole of the first main rotating part 6, the second main rotating part 7 is provided with a second protrusion at the position corresponding to the first groove, and the second protrusion is vertically provided with a penetrating second protrusion The second vertical connection hole, the first rotating connector 20 passes through the first vertical installation hole and the second vertical connection hole in turn;
[0097] The arm lifting block 9 of the shoulder is provided with a lifting arm groove toward one end of the shoulder circumference block 10, and the position corresponding to the lifting arm groove on the shoulde...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap