Positioning method and device in indoor dynamic scene
A positioning method and positioning device technology, applied in the field of positioning methods and devices in indoor dynamic scenarios, can solve the problems of difficulty in feature point selection and poor positioning effect, and achieve the effect of optimizing positioning information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
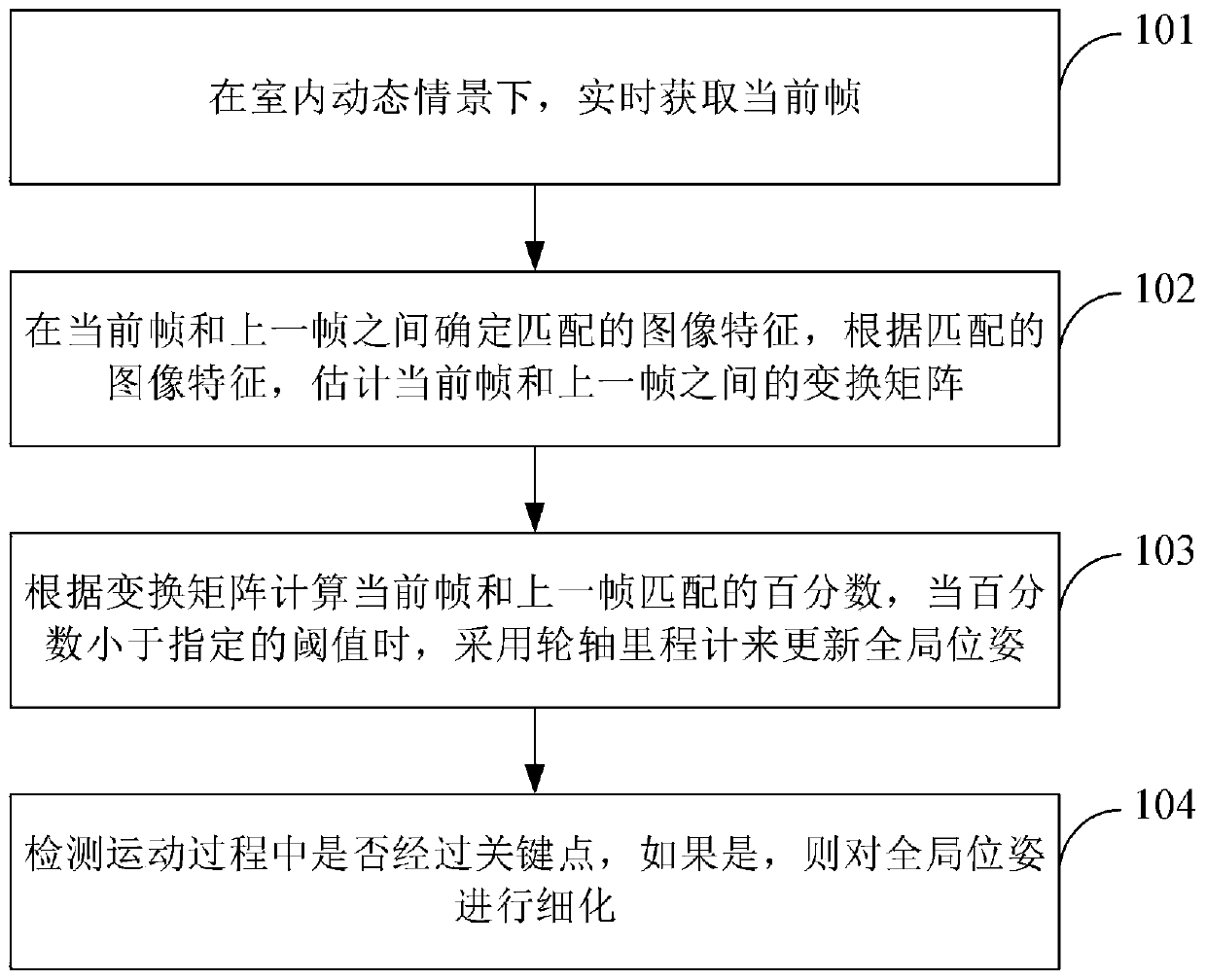
[0044] figure 1 It is a flowchart of a positioning method in an indoor dynamic scene according to an embodiment of the present application. see figure 1 , the method includes:
[0045] 101: In an indoor dynamic scene, obtain the current frame in real time;
[0046] 102: Determine the matching image features between the current frame and the previous frame, and estimate the transformation matrix between the current frame and the previous frame according to the matching image features;
[0047] 103: Calculate the matching percentage between the current frame and the previous frame according to the transformation matrix, and when the percentage is less than the specified threshold, use the axle odometer to update the global pose;
[0048] 104: Detect whether key points are passed during the movement process, and if so, refine the global pose.
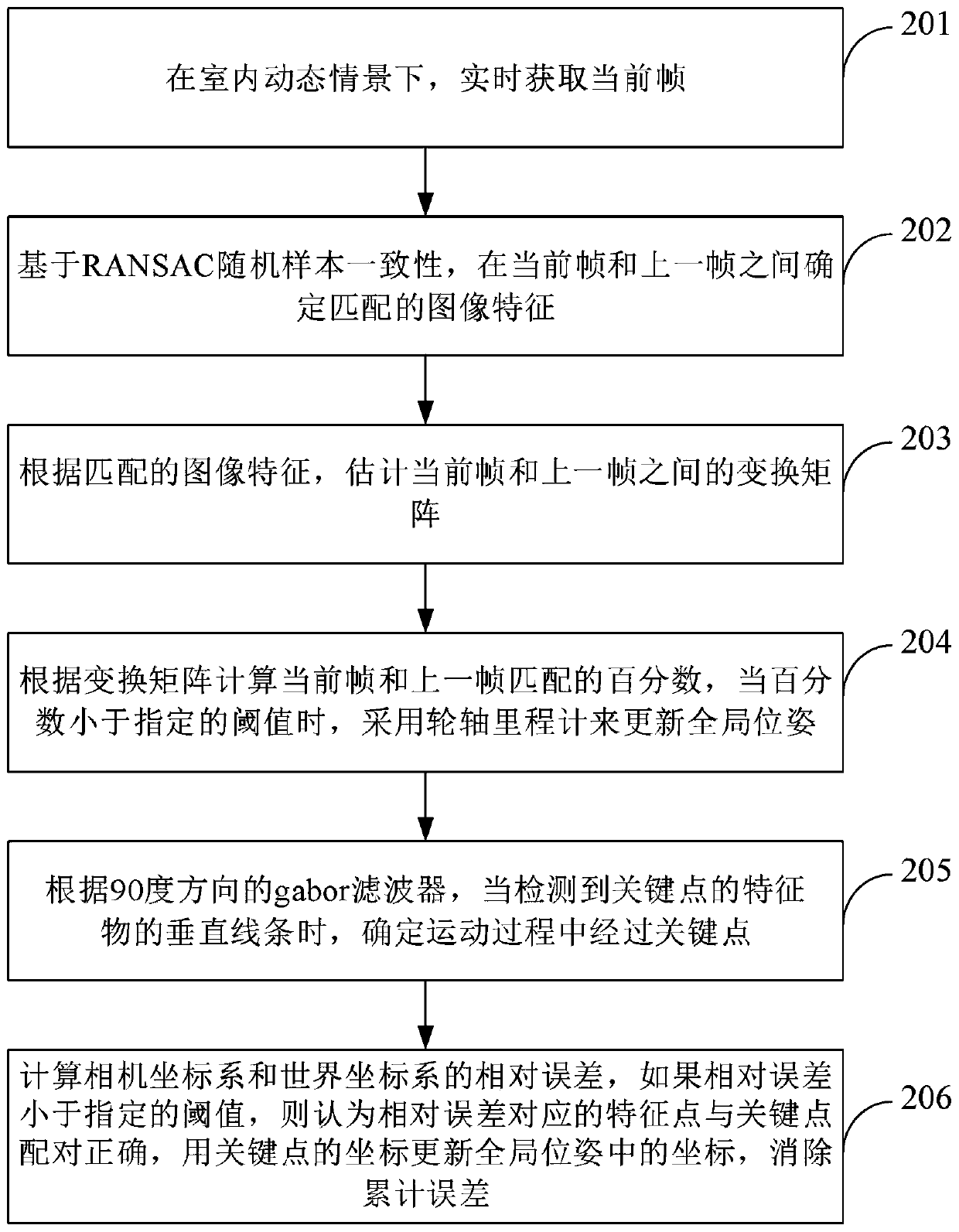
[0049] In this embodiment, optionally, detecting whether a key point is passed during the movement includes:
[0050] According to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More