

Target position threshold determination method, apparatus and device, and storage medium
A technology of target position and determination method, which is applied in the field of image processing, can solve problems such as poor threshold accuracy, and achieve the effect of accurate threshold
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
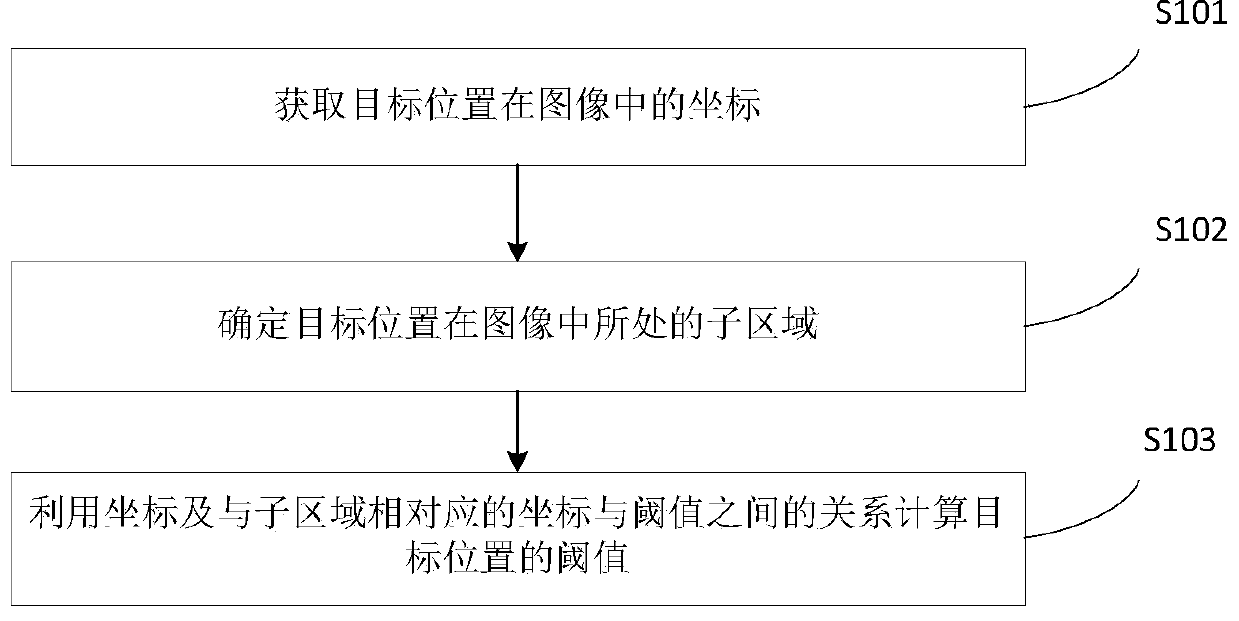
[0058] Embodiment 1 of the present invention provides a method for determining a threshold of a target position. figure 1 It is a schematic flow chart of the method for determining the target position threshold in Embodiment 1 of the present invention, as figure 1 As shown, the target position threshold determination method in Embodiment 1 of the present invention includes the following steps:
[0059] S101: Obtain the coordinates of the target position in the image.
[0060] S102: Determine the sub-region where the target position is located in the image.
[0061] Further, before determining the sub-area where the target position is located in the image, it also includes: selecting a position point in the image; when the number of the selected position points is an odd number, the position point is used as the vertex to form a sub-area; when selecting When the number of position points is an even number, use the position points as vertices to form a sub-region; or use the s...
Embodiment 2
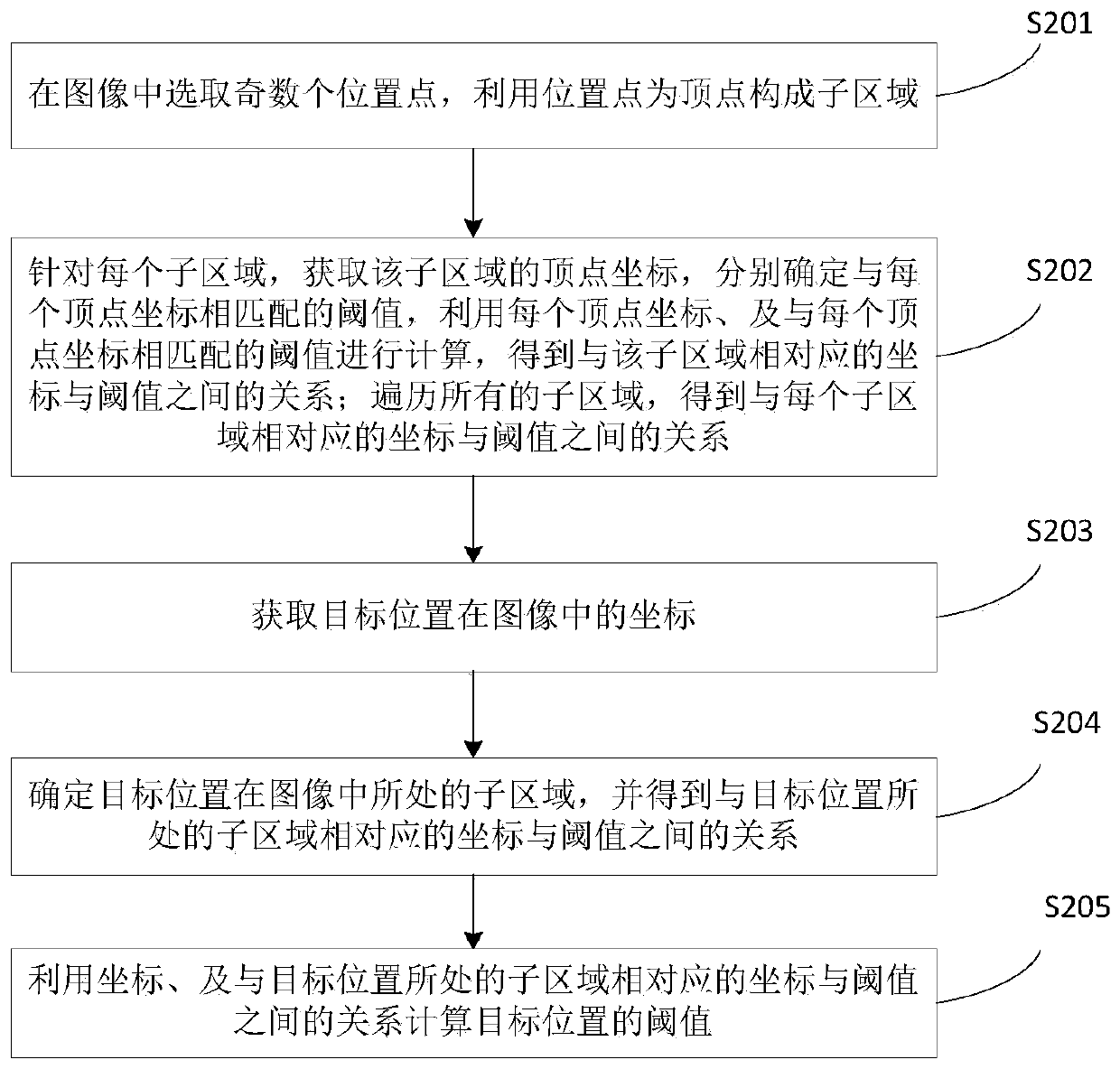
[0068] Embodiment 2 of the present invention provides a method for determining a threshold of a target position. figure 2 It is a schematic flow chart of the method for determining the target position threshold in Embodiment 2 of the present invention, as figure 2 As shown, the target position threshold determination method in Embodiment 2 of the present invention includes the following steps:
[0069] S201: Select an odd number of position points in the image, and use the position points as vertices to form sub-regions.
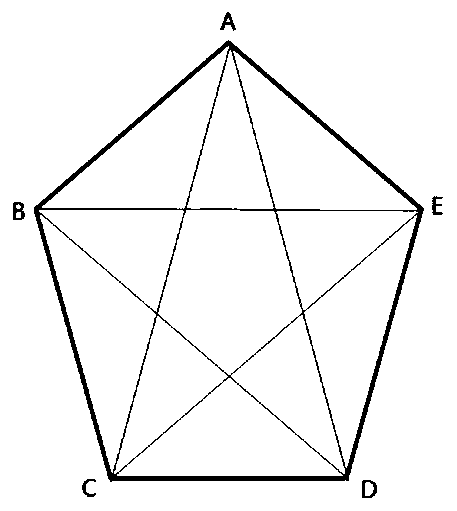
[0070] As a specific implementation manner, the number of selected points is 5. image 3 It is a schematic diagram of each sub-region of a specific example in Embodiment 2 of the present invention, such as image 3 As shown, five points A, B, C, D, and E are selected in the image, and the above five points divide the image into 10 sub-regions.
[0071] S202: For each sub-area, obtain the vertex coordinates of the sub-area, respectively determine the thr...
Embodiment 3
[0081] Embodiment 3 of the present invention provides a method for determining a threshold of a target position. Figure 7 It is a schematic flow chart of the method for determining the target position threshold in Embodiment 3 of the present invention, as Figure 7 As shown, the target position threshold determination method in Embodiment 3 of the present invention includes the following steps:
[0082] S701: Select an even number of position points in the image, use the selected position points as vertices to form a polygon, obtain midpoints of each side of the polygon respectively, and use the selected position points and midpoints as vertices to form subregions.
[0083] As a specific implementation manner, the number of selected points is 4. Figure 8 It is a schematic diagram of each sub-region of a specific example in Embodiment 3 of the present invention, such as Figure 8 As shown, five points A, B, C, and D are selected in the image, and the above five points divid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More