

Environment semantic perception method based on visual information
A visual information and semantic technology, applied in image data processing, instrumentation, computing, etc., can solve problems such as difficult to distinguish between two terrains, and achieve the effect of improving high-level semantic understanding and reliable information input
Inactive Publication Date: 2020-04-28
HARBIN INST OF TECH
View PDF8 Cites 28 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0002] The effective perception of the mobile platform in the environment can be realized through synchronous positioning and drawing technology. It can not only know the obstacle information in the environment, but also obtain the relative relationship between itself and the environment. This is a key step to realize the autonomy of the platform. However, as With the continuous development of platforms and detection payloads, more mission scenarios and requirements have been proposed, and the recognition of target appearance and geometric features can no longer solve practical problems
In the process of patrolling extraterrestrial celestial bodies, if a piece of terrain with a similar appearance can only rely on traditional recognition methods, the three-dimensional reconstruction of the environment can be obtained, but it is difficult to distinguish the difference between the two terrains. For the previous detection missions, as long as It is sufficient to be able to identify whether there are obstacles ahead and whether they can pass through. However, with the increase of detection time and scale, the existing cognition is far from enough. It is necessary to have a semantic understanding of the environment, that is, not only to detect whether If there is a goal, it needs to be further analyzed to find out what it is, which will be the core of the patrol to become intelligent
In the research of unmanned driving, this problem is equally important. During the driving process, you will encounter random targets such as vehicles, pedestrians, and roadblocks. When effectively judging what is the obstacle, it highlights the importance of semantic understanding. After giving the understanding result that one is a person and the other is a haystack, it is easy to make a correct judgment
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
specific Embodiment
[0098] (1) Verify parameter settings
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
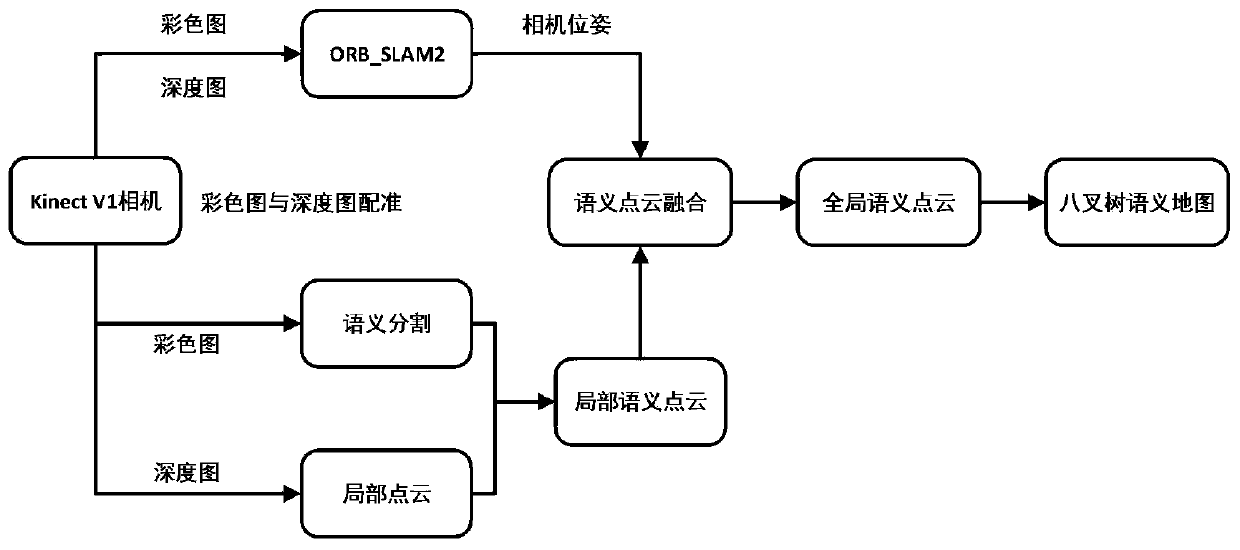
The invention provides an environmental semantic perception method based on visual information, which comprises the following steps: acquiring environmental image information by using a Kinect V1.0 camera to obtain a registered color image and depth image; resolving the three-dimensional pose of the camera according to the ORB feature points extracted from each frame through an ORB _ SLAM2 processbased on the registered color image and depth image to obtain camera pose information; performing semantic segmentation on each frame of image to generate semantic color information; synchronously generating a point cloud according to the input depth map and the internal reference matrix of the camera; registering the semantic color information into the point cloud to obtain a local semantic point cloud result; fusing the camera pose information with the local semantic point cloud result to obtain new global semantic point cloud information; and representing the fused global semantic point cloud information by using an octree map to obtain a final three-dimensional octree semantic map. According to the invention, deeper humanoid understanding is provided for environment detection of the extraterrestrial celestial body patroller.
Description
technical field [0001] The invention relates to an environmental semantic perception method based on visual information, and belongs to the field of artificial intelligence information technology. Background technique [0002] The effective perception of the mobile platform in the environment can be realized through synchronous positioning and drawing technology. It can not only know the obstacle information in the environment, but also obtain the relative relationship between itself and the environment. This is a key step to realize the autonomy of the platform. However, as With the continuous development of platforms and detection payloads, more mission scenarios and requirements have been proposed, and the recognition of target appearance and geometric features can no longer solve practical problems. In the process of patrolling extraterrestrial celestial bodies, if a piece of terrain with a similar appearance can only rely on traditional recognition methods, the three-di...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Applications(China)
IPC IPC(8): G06T7/11G06T7/50G06T7/90
CPCG06T2207/10024G06T2207/10028G06T7/11G06T7/50G06T7/90
Inventor 白成超郭继峰郑红星刘天航
Owner HARBIN INST OF TECH