

Super-redundant robot trajectory planning method and system based on pseudo-inverse constraint
A trajectory planning and robotics technology, applied in the field of trajectory planning and robotics, can solve problems such as large fluctuations, limiting the motion performance of super-redundant robots, joint motion mutations, etc., achieving small fluctuations, no need for segmented processing, and optimized initial values easy to find effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The concept, specific structure and technical effects of the present disclosure will be clearly and completely described below in conjunction with the embodiments and drawings, so as to fully understand the purpose, scheme and effect of the present disclosure. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
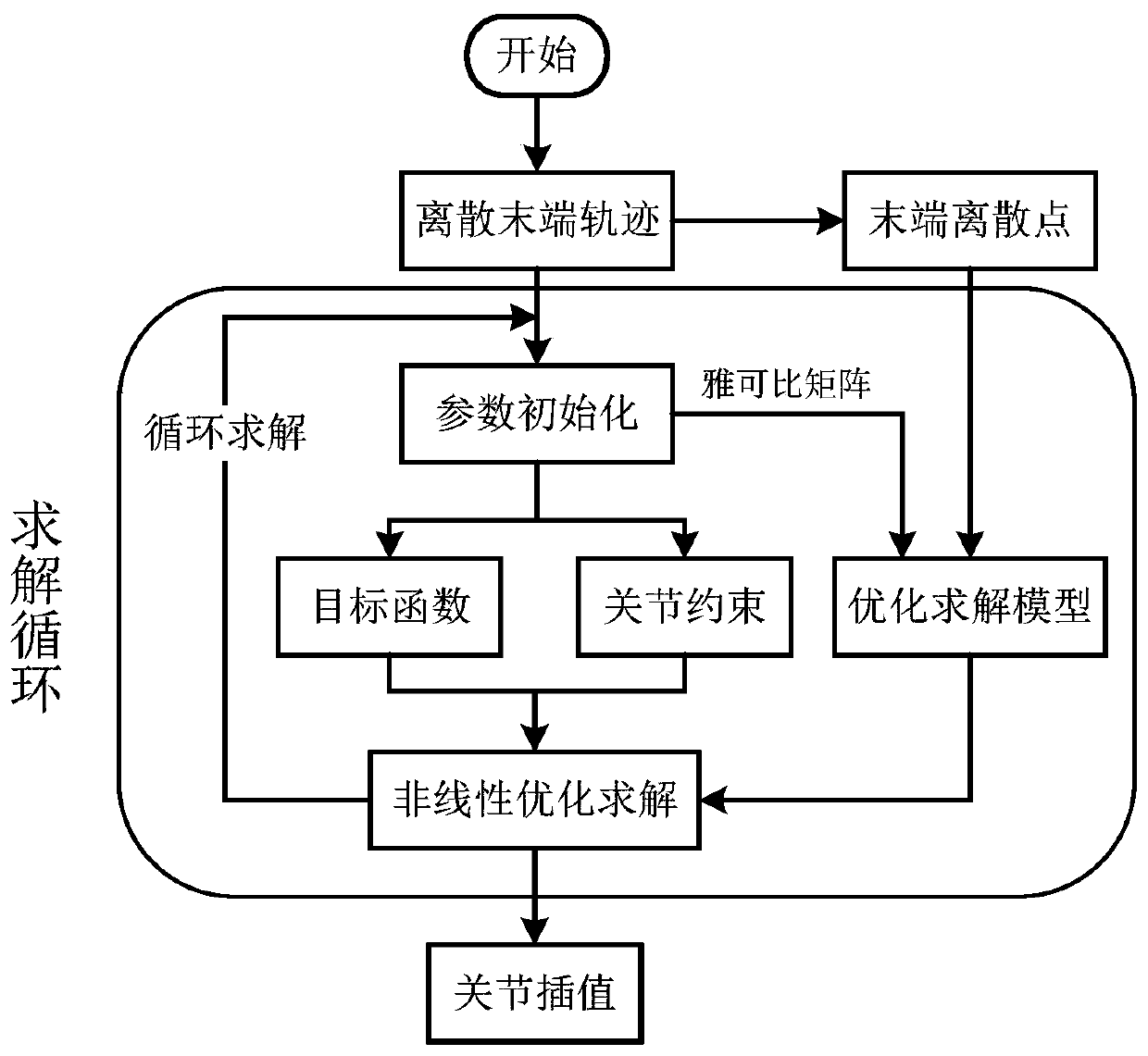
[0029] A super-redundant robot trajectory planning method based on pseudo-inverse constraints in the embodiment of the present invention, the idea is to use the Jacobian matrix solved at the previous moment as the Jacobian matrix at the current moment, so as to establish the corresponding joint state between adjacent discrete end paths Using the pseudo-inverse method to calculate the initial value of the optimization variable, a series of discrete joint states are obtained through multiple iterative optimization solutions, and then the trajectory of e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More