

A time-delay-resistant and high-precision active disturbance rejection attitude control method based on fixed-time differentiator prediction
A fixed time, attitude control technology, applied in attitude control, vehicle position/route/height control, control/adjustment system, etc., can solve problems such as falling into a hysteresis loop state, attitude divergence instability, attitude reciprocating oscillation, etc., to avoid Attitude oscillation, broad application background, and the effect of reducing development and production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
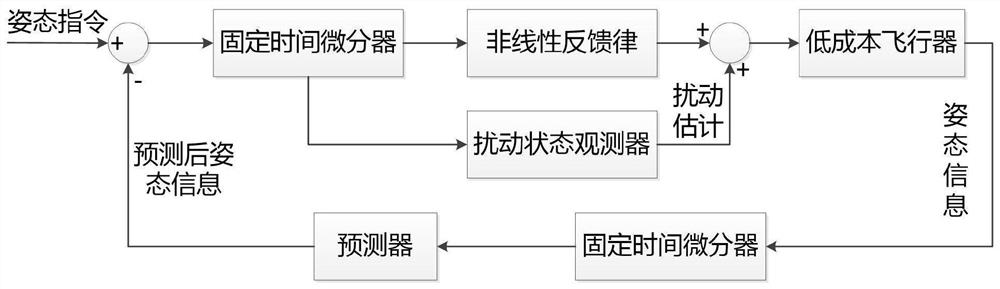
[0052] An anti-time-delay high-precision self-disturbance rejection attitude control method based on fixed time differentiator prediction, the anti-time-delay high-precision attitude control method includes the following steps:
[0053] Step 1: Design a fixed-time convergent differentiator and obtain the attitude change rate observations. The detailed process is:
[0054] Step 1: Use the rate gyroscope to obtain the attitude information of the aircraft with a time delay of kh Where h represents the sampling period, k represents the number of delay cycles, represents the pitch angle, is the yaw angle, is the roll angle;
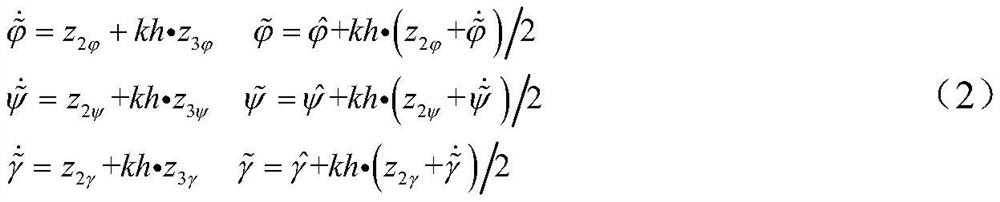
[0055] Step 2: Construct a third-order fixed-time convergent differentiator as shown below for the three channels of pitch, yaw and roll respectively:
[0056]
[0057] where the subscript Respectively represent the parameters corresponding to the pitch, yaw and roll channels; y i (t) represents the measured values of different channels (i.e. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More