

Recursive multi-subsample large dynamic inertial navigation method
An inertial navigation and large dynamic technology, which is applied to combined navigators, navigation through speed/acceleration measurement, etc. It can solve the problems of angular velocity continuity and limited compensation effect without considering adjacent navigation cycles, and increase the navigation update cycle. , the effect of reducing the output burden and improving the accuracy of inertial navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
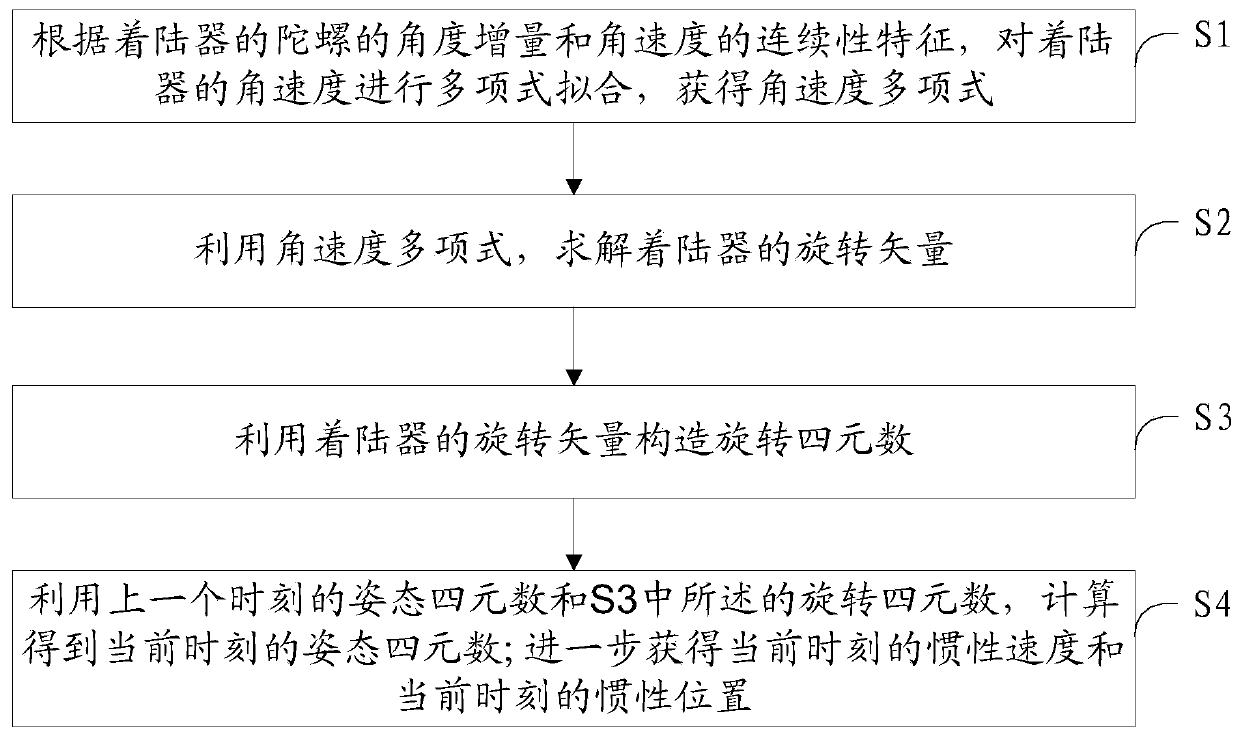
[0046] A recursive multi-sample large dynamic inertial navigation method, such as figure 1 shown, including the following steps:
[0047]1) According to the angular increment of the gyro of the lander and the continuity characteristics of the angular velocity, polynomial fitting is performed on the angular velocity of the lander to obtain the angular velocity polynomial.
[0048] Consider [t m ,t m+1 ] navigation update in the interval, polynomial fitting is performed on the angular velocity in the time interval
[0049] ω(t m +τ)=a m +b m τ+c m τ 2 0≤τ≤ΔT (1)
[0050] Where ω is the inertial angular velocity projected in the IMU body coordinate system, ΔT=t m+1 -t m is the navigation update cycle, a m ,b m ,c m Respecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More