Multi-mode biped wheel leg robot
A robot and multi-modal technology, applied in the field of robotics, can solve problems such as limited application scenarios and inapplicability to long-distance walking mobile applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the description of the drawings and specific embodiments.
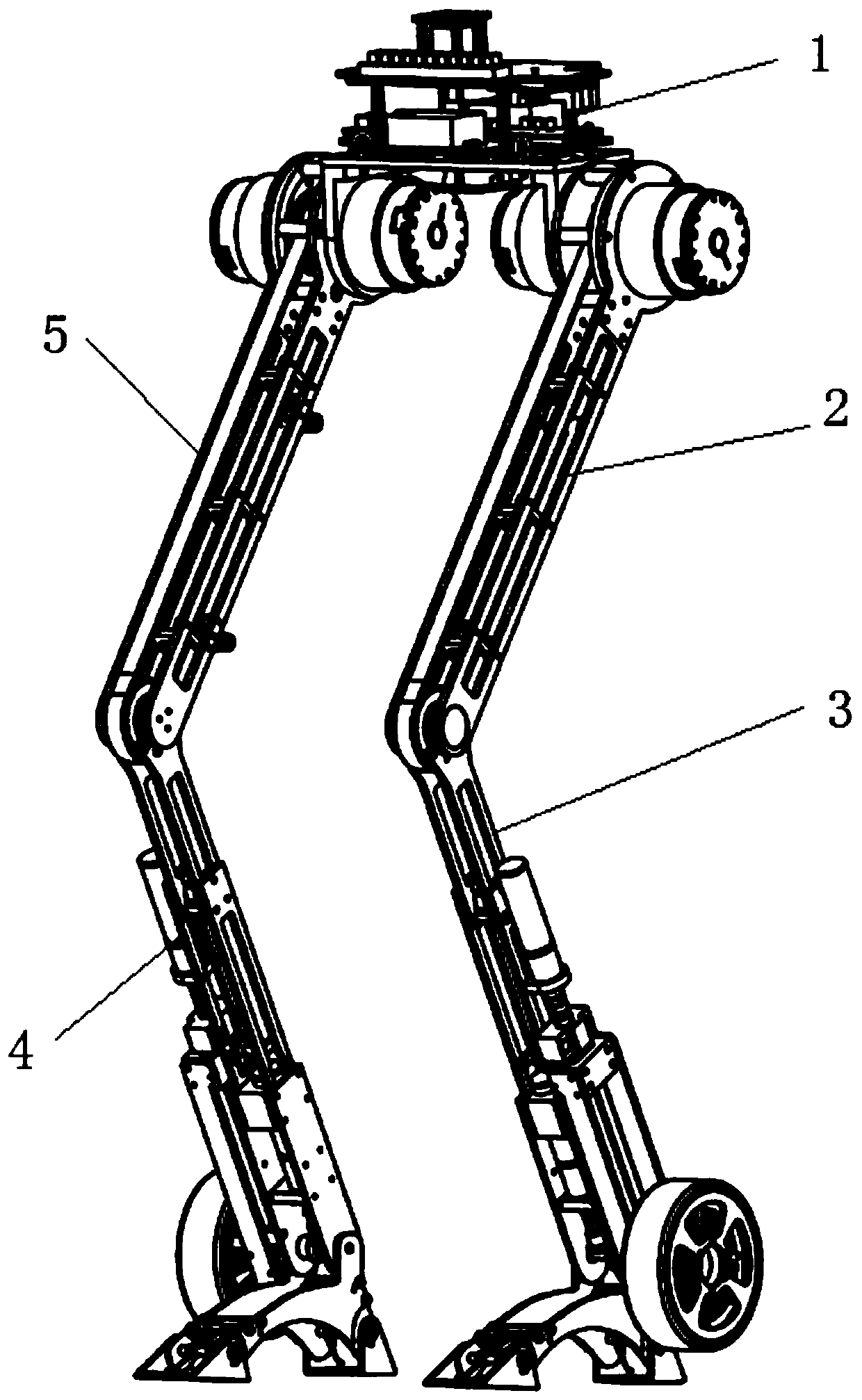
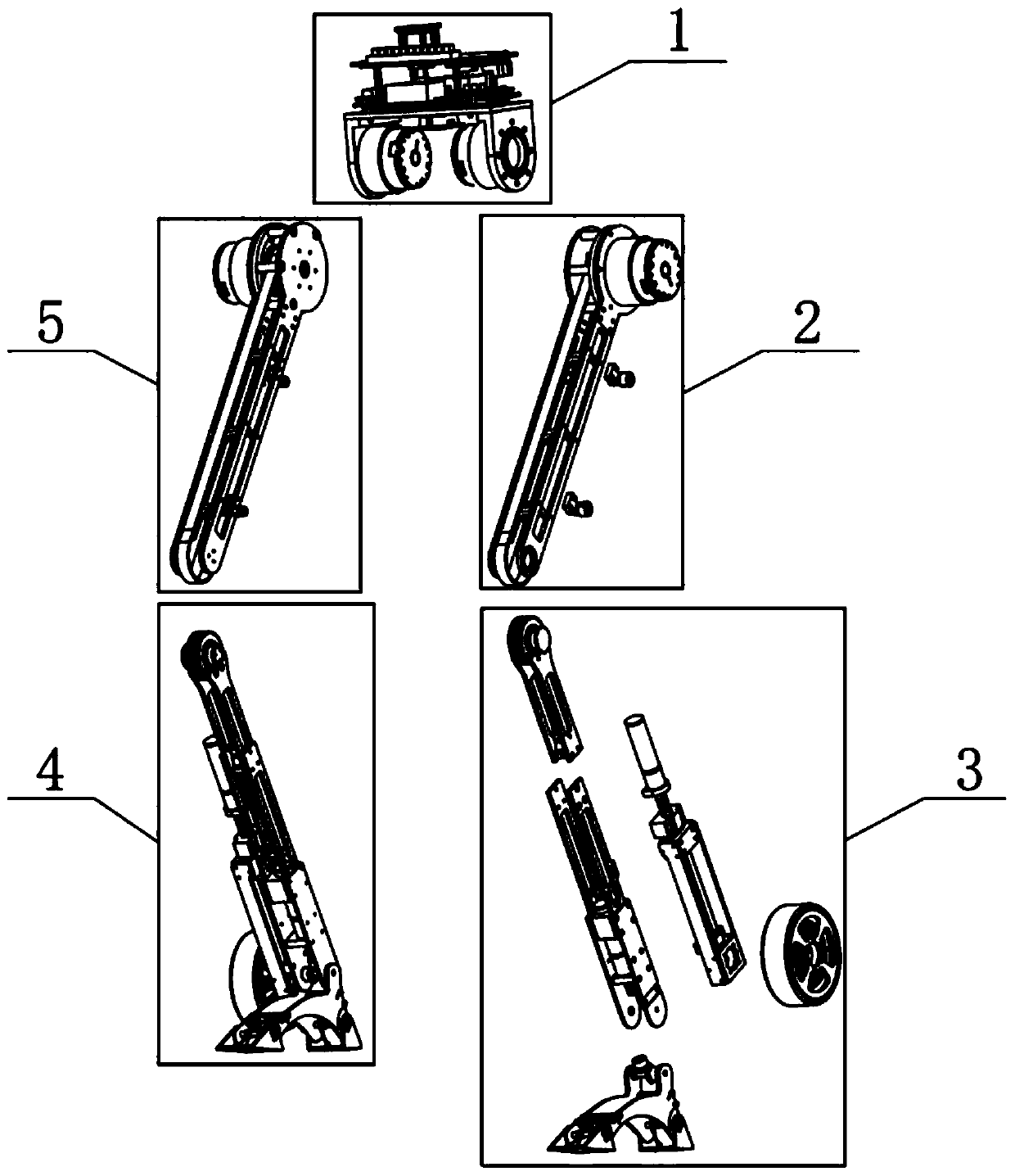
[0033] Aiming at the deficiencies in the prior art, the present invention proposes a multi-modal bipedal wheel-legged robot, which is capable of switching wheels and legs for different road surfaces, and solves the problem that bipedal robots or wheeled robots are incompatible at the present stage. The advantages of the two robots can be combined to realize the problem of high efficiency and high adaptability of the robot.
[0034] The two wheels of the double-legged robot can move quickly on a flat road. The legs can be regarded as active suspension to adapt to uneven roads. vertical obstacle avoidance. Adding two wheels and two feet to the robot, and switching between the wheels and feet, enables the robot to move continuously and smoothly on long stepped roads. The combination of wheels and legs will greatly improve the overall perfo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More