

Method, device, equipment and storage medium for preventing three-phase motor from overcurrent
A technology of three-phase current and three-phase motor, which is applied in the control of electromechanical transmission, control of generators, motor control, etc., can solve problems such as phase current overcurrent faults, and achieve the effect of avoiding overcurrent faults
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
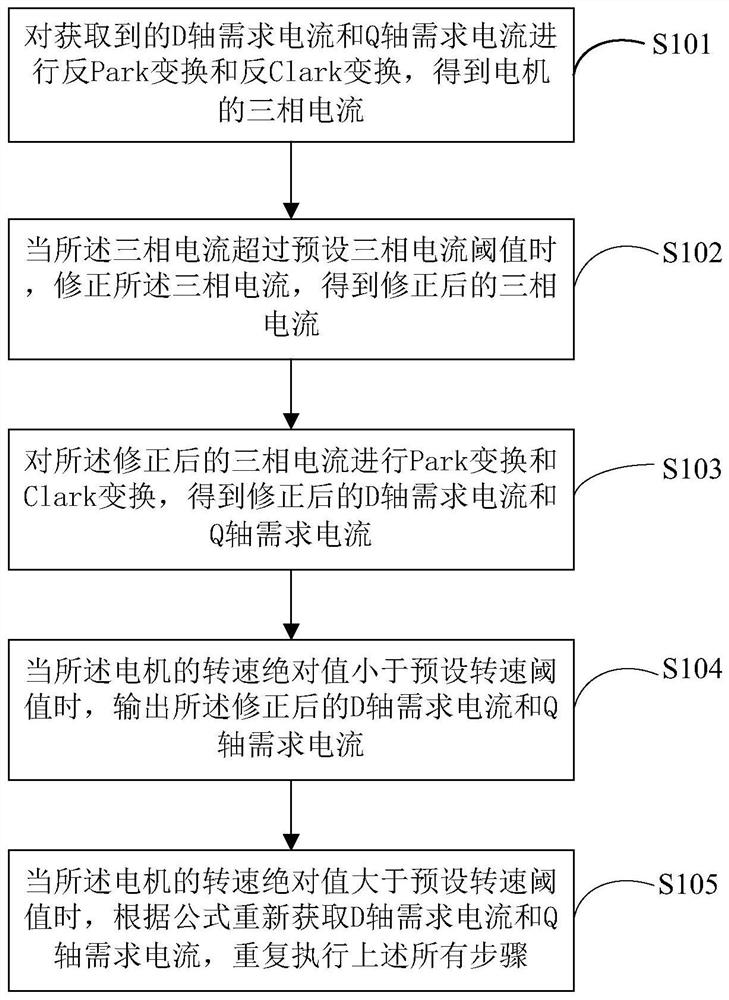
[0045] An embodiment of the present disclosure provides a method for preventing overcurrent of a three-phase motor, figure 1 It is a schematic flowchart of a method for preventing overcurrent of a three-phase motor according to an exemplary embodiment.
[0046] Such as figure 1 As shown, a method to prevent overcurrent of a three-phase motor includes:
[0047] S101 performs inverse Park transformation and inverse Clark transformation on the obtained D-axis demand current and Q-axis demand current to obtain the three-phase current of the motor;
[0048] Specifically, before inverse Park transformation and inverse Clark transformation are performed on the obtained D-axis demand current and Q-axis demand current, it also includes obtaining the D-axis demand current and Q-axis demand current of the motor, where the query torque- The speed-D-axis ammeter and torque-speed-Q-axis ammeter can directly obtain the required D-axis current and Q-axis current, or directly obtain the D-ax...
Embodiment 2
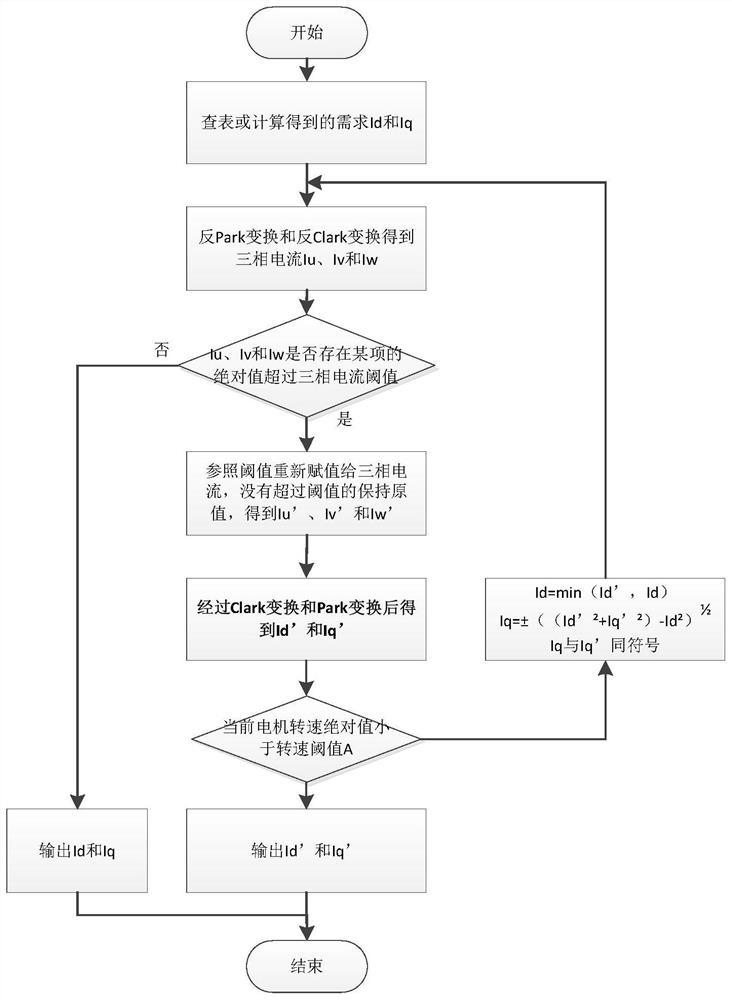
[0082] An embodiment of the present disclosure provides a method for preventing overcurrent of a three-phase motor, figure 2 It is a schematic flowchart of a method for preventing overcurrent of a three-phase motor according to an exemplary embodiment.
[0083] Such as figure 2 As shown, a method to prevent overcurrent of a three-phase motor includes:
[0084] Step 1: Directly obtain the required D-axis current and Q-axis current by querying the torque-speed-D-axis ammeter and torque-speed-Q-axis ammeter, or directly obtain the D-axis demand current and Q demand current through formula calculation.
[0085] Step 2: Perform inverse Park transformation and inverse Clark transformation on the obtained D-axis demand current and Q-axis demand current to obtain three-phase currents Iu, Iv and Iw of the motor.
[0086] Step 3: Determine whether any one of the three-phase currents Iu, Iv and Iw of the motor exceeds the preset phase current threshold. When any one of the three-phas...
Embodiment 3
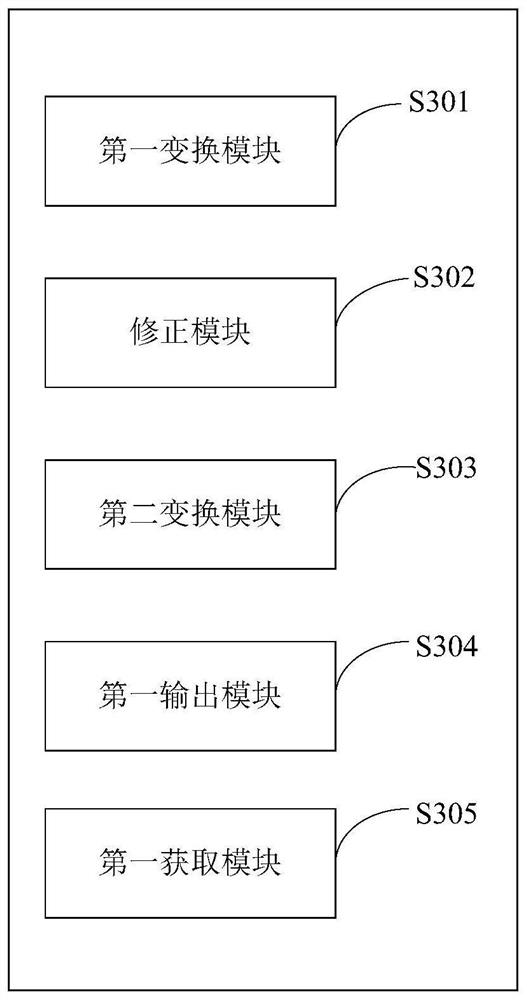
[0095] An embodiment of the present disclosure provides a device for preventing overcurrent of a three-phase motor, image 3 It is a structural schematic diagram of a device for preventing overcurrent of a three-phase motor according to an exemplary embodiment.
[0096] Such as image 3 As shown, in an embodiment of the present disclosure, a device for preventing overcurrent of a three-phase motor includes:
[0097] S301 The first transformation module is used to perform inverse Park transformation and inverse Clark transformation on the obtained D-axis demand current and Q-axis demand current to obtain the three-phase current of the motor;
[0098] S302 correction module, used to correct the three-phase current when the three-phase current exceeds the preset three-phase current threshold, and obtain the corrected three-phase current;
[0099] S303 The second transformation module is used to perform Park transformation and Clark transformation on the corrected three-phase cu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More