

A multi-level collaborative planning and agile maneuvering method for spacecraft three-superior control
An agile maneuvering and space vehicle technology, applied to motor vehicles, aerospace vehicles, guidance devices of space vehicles, etc. Realize the dynamic planning of the secondary target trajectory of the load and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
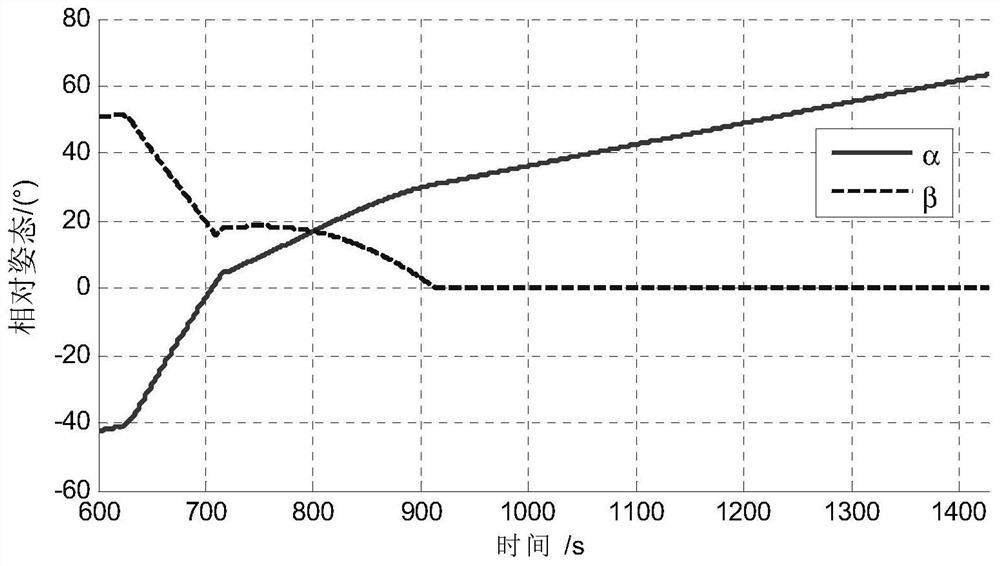
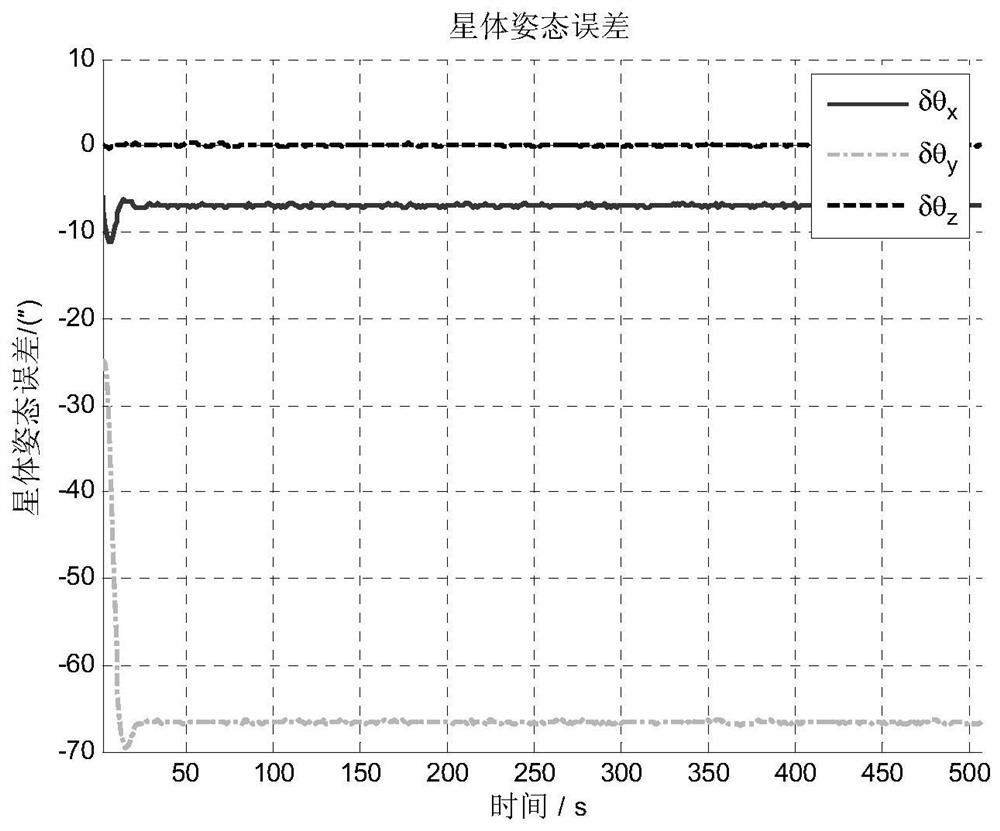
[0252] Two-level collaborative planning and agile maneuverability check of target spacecraft pointing.
[0253] Define the length of the load attitude maneuver sequence array N=5, and use the Lagrangian polynomial interpolation method to calculate the real-time star attitude of the load control cycle time: the star controller and the load controller perform two-stage cooperative control of the tracking spacecraft, and the target spacecraft maneuvers agilely pointing to the control. figure 1 The dynamic trajectory planning during the pointing process of the target spacecraft is given. figure 2 The two-stage pointing control error of tracking the spacecraft star and payload in the whole agile maneuvering pointing process is given. The pointing control of the target spacecraft at about 70 arcseconds can be realized through the first-level control of the star, and the sub-arcsecond level pointing control of the target spacecraft can be realized through the secondary control.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More