

Tracking method and apparatus of landing goal of unmanned aerial vehicle, and unmanned aerial vehicle
A drone and target technology, applied in the field of drones, can solve the problems of tracking failure, reduced user experience, inaccurate target marking, etc., to achieve the effect of improving efficiency and accuracy, and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The design idea of the present invention is: in order to ensure the accuracy of the tracking of the landing target by the UAV during the landing process, the technical solution provided by the present invention is to combine the identification of the landing target with the tracking algorithm, which greatly improves the tracking accuracy. Accuracy and tracking efficiency. In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
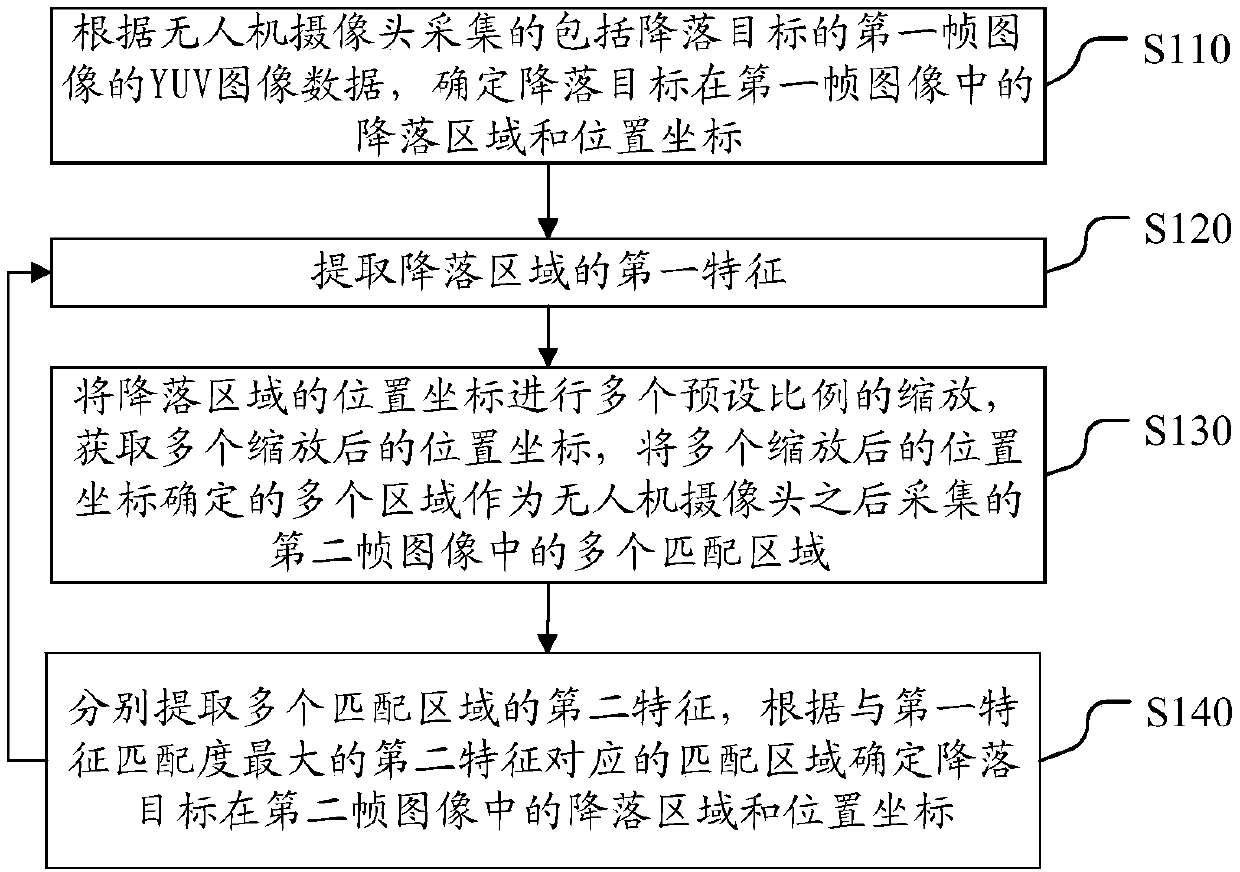
[0024] figure 1 A schematic flow chart of a method for tracking a drone landing target provided by an embodiment of the present invention. figure 1 As shown, the method includes:
[0025] Step S110, according to the YUV image data of the first frame image of the landing target collected by the UAV camera, determine the landing area and position coordinates of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More