

Intelligent detection device of defects of mobile phone outer shell based on machine vision
A mobile phone shell and intelligent detection technology, which is applied in the direction of optical testing for flaws/defects, sorting, etc., can solve problems such as slow speed and easy fatigue, and achieve the effect of ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in further detail below in conjunction with specific examples, but the embodiments of the present invention are not limited thereto.
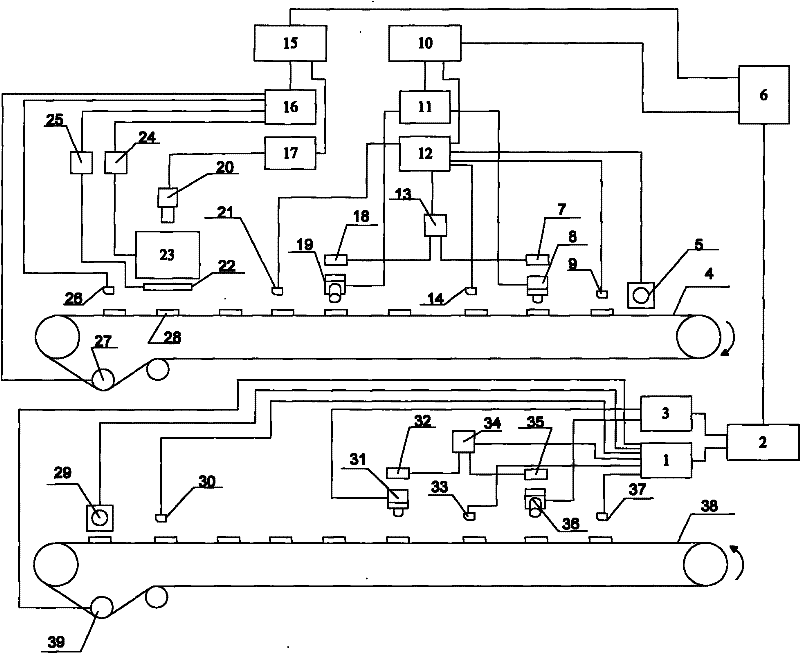
[0030] like figure 1 , the first industrial computer 15 is equipped with the first signal acquisition card 16 and the first image acquisition card 17, and this computer is responsible for the defect detection of the top surface of the mobile phone shell. The coaxial light source 23 is connected with the coaxial light source controller 24, the ring light source 22 is connected with the ring light source controller 25, the ring light source 22 is located directly below the coaxial light source 23, the axes of the two light sources coincide, and the first signal acquisition card 16 Respectively output control signals to the coaxial light source controller 24 and the ring light source controller 25, thereby respectively controlling the brightness of the coaxial light source 23 and the ring light source...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More