

Multi-target tracking evaluation method considering shape difference based on Fourier transform
A technology of multi-target tracking and Fourier transform, applied in the field of multi-target tracking, can solve the problems of not including metrics, unfavorable for researchers to choose tracking algorithm, unfavorable comparison results, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings.
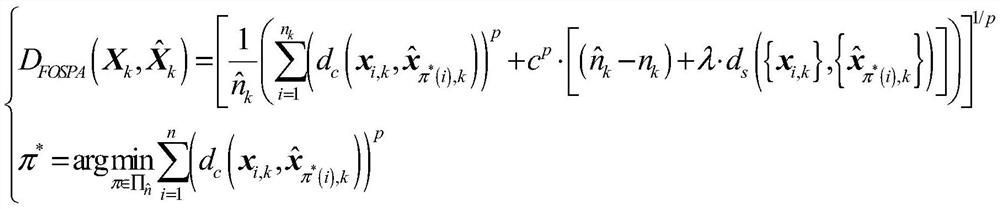
[0043] For the convenience of understanding, the FOSPA distance is explained below, and the FOSPA distance refers to an improved OSPA distance based on the Fourier operator.
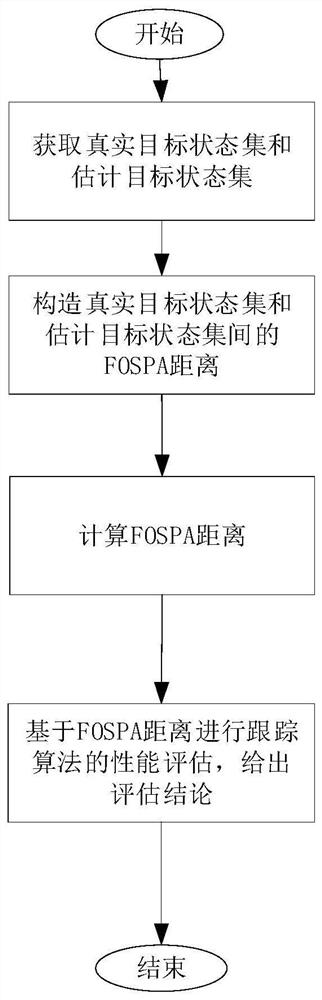
[0044] Such as figure 1 As shown, the present embodiment provides a multi-target tracking evaluation method that considers shape differences based on Fourier transform, and the steps are as follows:
[0045] Step 1. Assume that the real state set of the target at time k in the process of multi-target tracking is In the random finite set multi-target tracking algorithm, the target state estimation set obtained by peak extraction is where n k with are the known number of real targets and the estimated number of targets extracted from the tracker, respectively, and in the tracking model with Usually contains a position component and a velocity component, such as is to contain the positio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More