

An elbow exoskeleton for rehabilitation robots
A rehabilitation robot and exoskeleton technology, applied in the field of rehabilitation robots, can solve the problems of poor comfort, unnatural joint movement of equipment, lack of perception function and mirror exchange function, etc., to achieve easy installation and disassembly, avoid elbow interactive load, The effect of improving convenience and utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
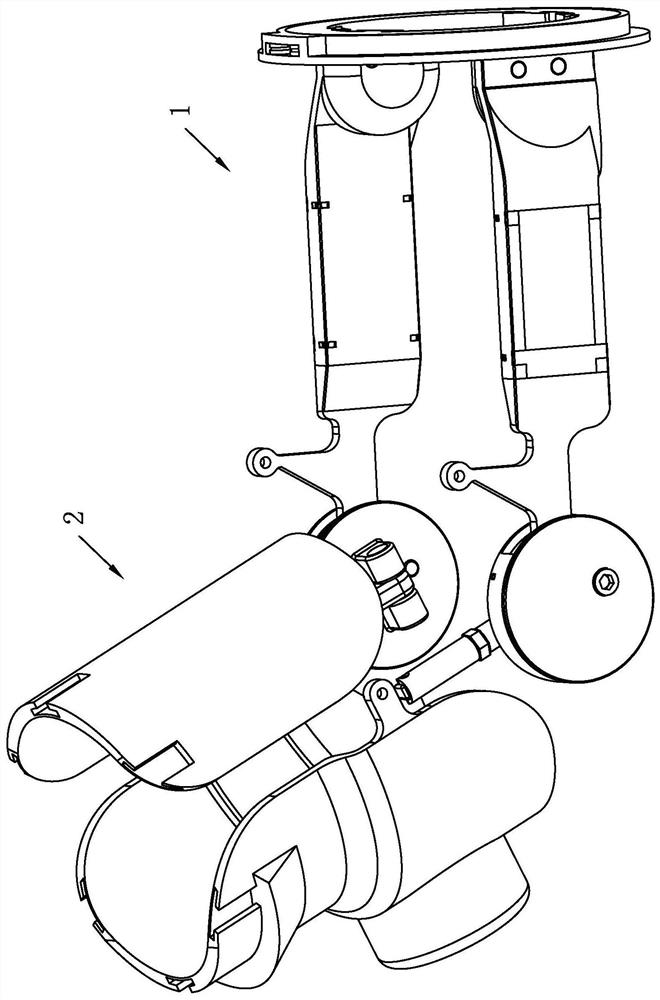
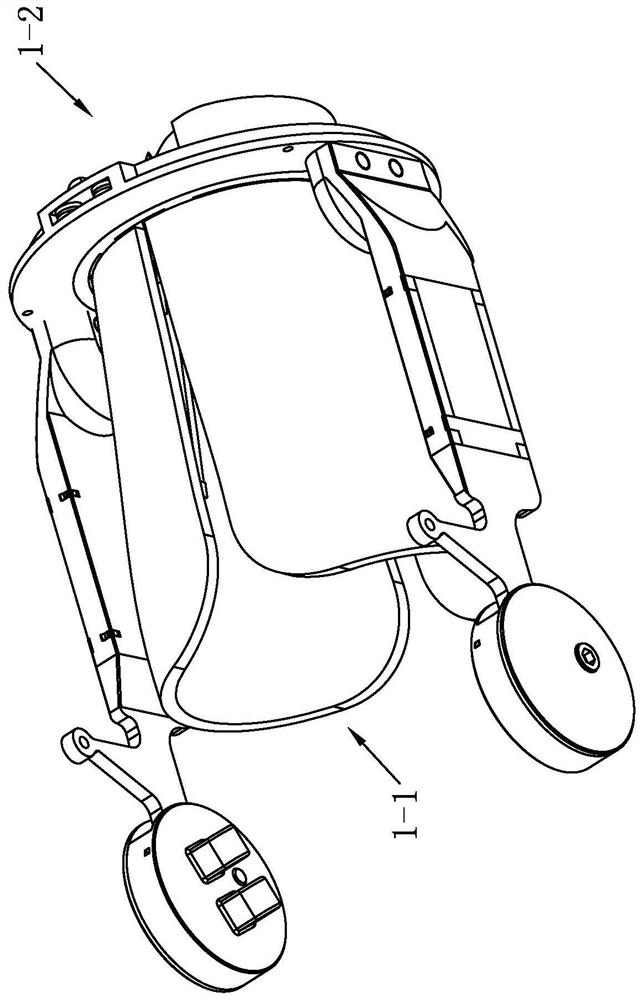
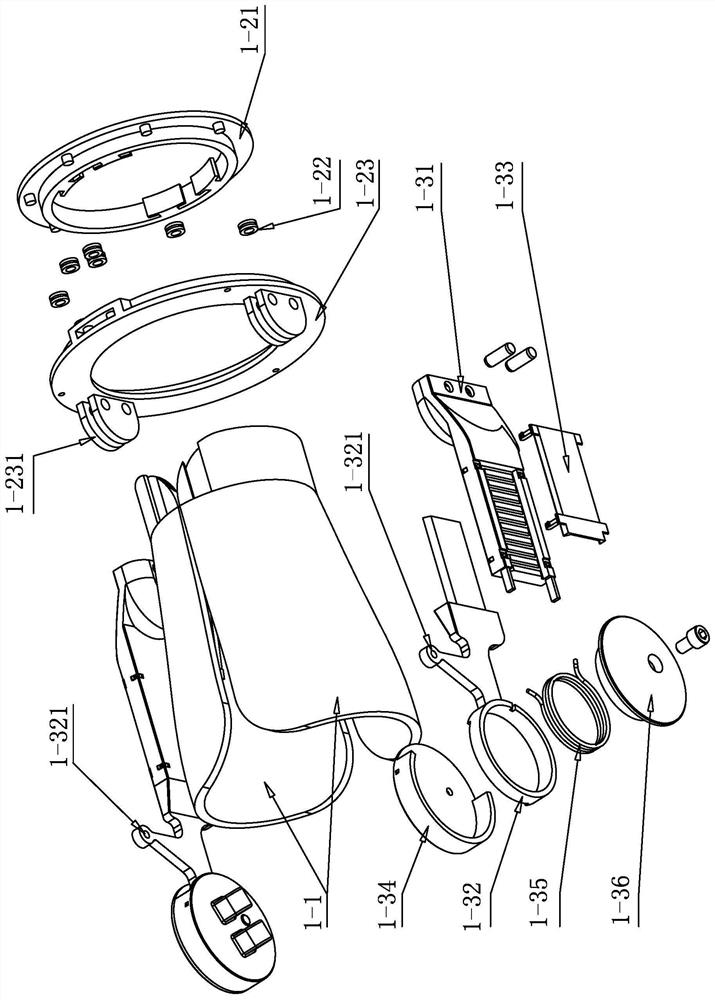
[0028] See Figure 1 、 Figure 2 and Figure 7 As shown, one of the present embodiments for the rehabilitation robot elbow exoskeleton, which comprises a forearm module 1, an upper arm module 2 and a transmission drive mechanism 3; the upper arm module 2 is connected together by a built-in passive compensation mechanism and two torsional spring mechanisms with the forearm module 1; the antagonistic arrangement between the forearm module 1 and the upper arm module 2 is an antagonistic arrangement of the Bowden line and the torsion spring, for controlling the bending and extension movement of the elbow joint; the transmission drive mechanism 3 transmits the power through the Bowden line to the forearm module 1, controlling the bending motion of the elbow joint. Forearm module 1 adapts to patients of different sizes through the adjustment teeth between the connecting rods of the forearm; the transmission drive mechanism transmits the power output to the antagonistic drive structure thro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More