

Wheel-leg combined type rapid step-climbing chassis suitable for mobile robot
A mobile robot and composite technology, applied in the field of mobile robots, can solve the problems of complex obstacle surmounting structure, reduce the practicability of mobile robots, and increase the manufacturing cost of mobile robots, and achieve simple obstacle surmounting structure, strong practicability and low manufacturing cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
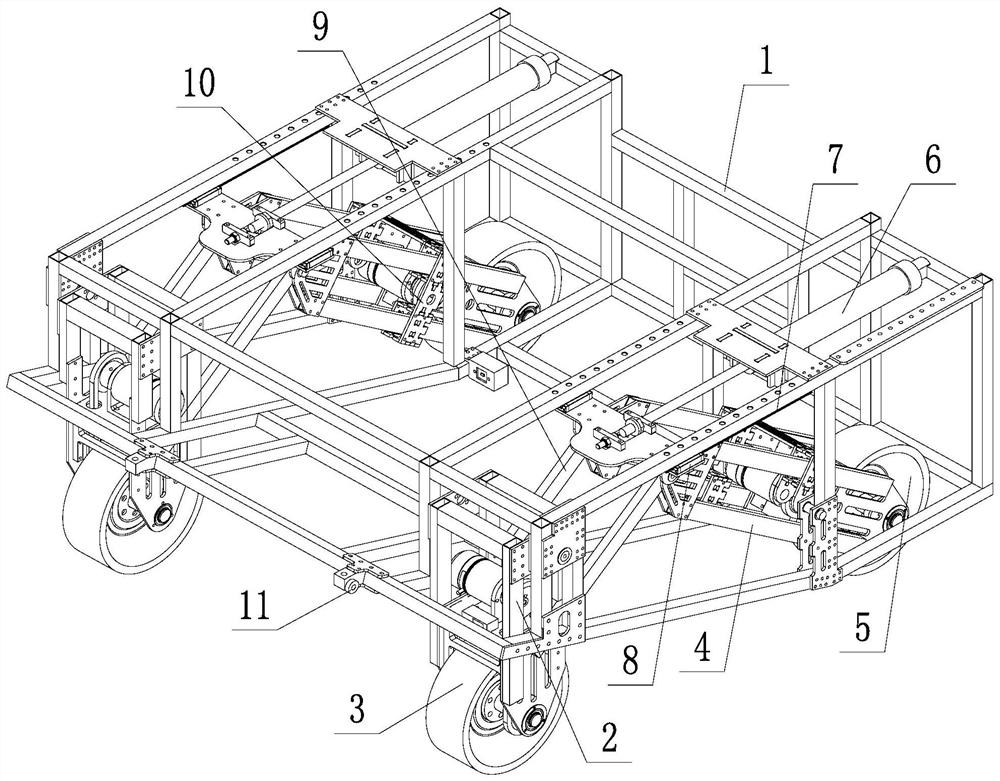
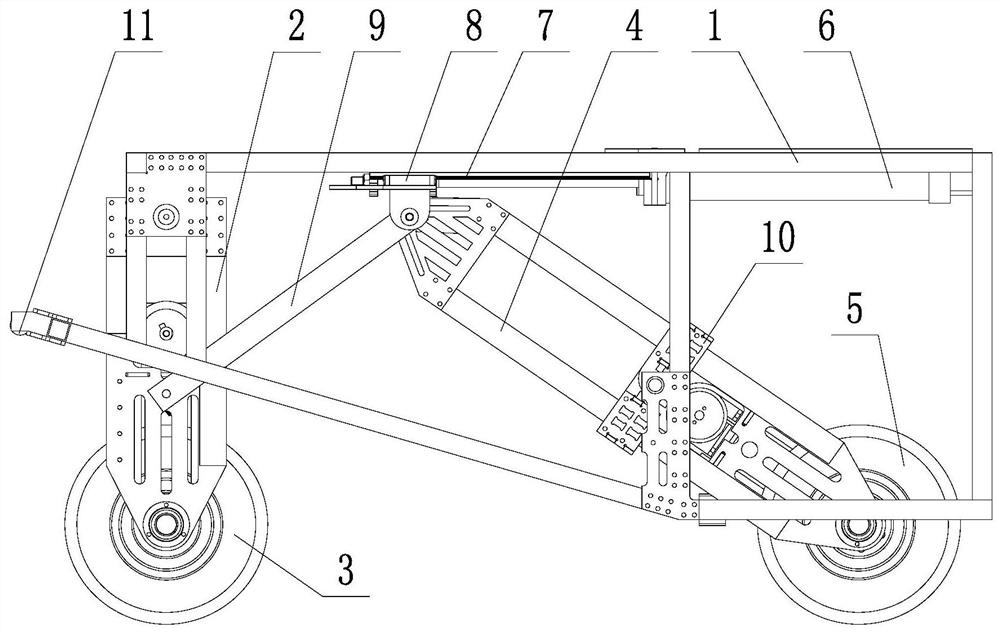
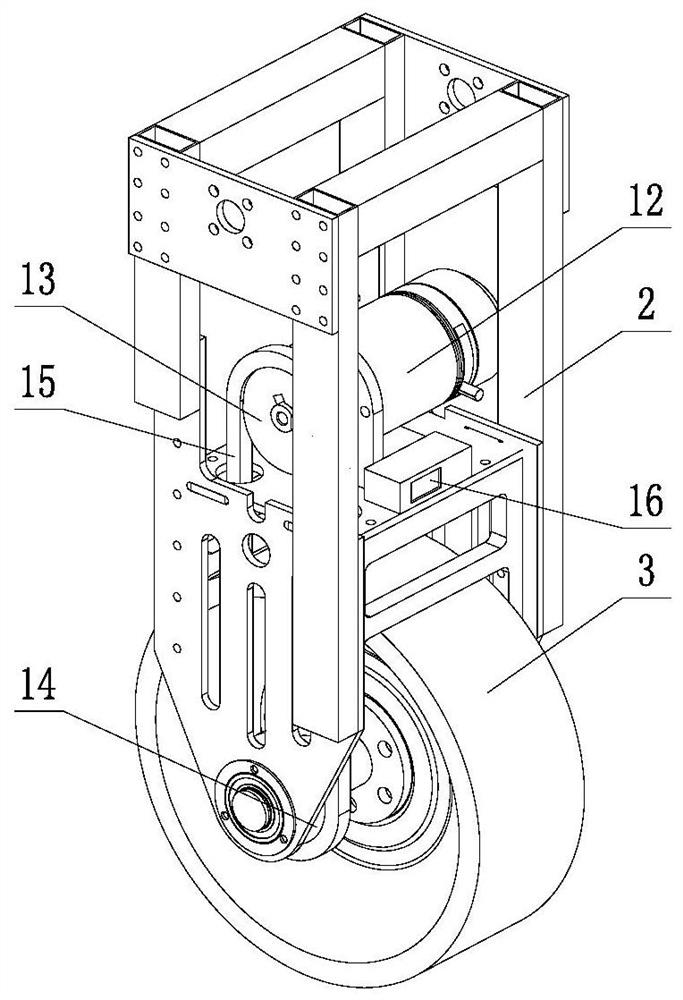
[0017] Such as Figure 1~4 As shown in the figure, a wheel-leg composite fast step-up chassis suitable for mobile robots includes a chassis frame 1, front wheel outriggers 2, front traveling wheels 3, rear wheel outriggers 4, rear traveling wheels 5, and a telescopic drive cylinder 6 , guide rail 7, slide block 8, connecting rod 9 and slide seat 10; The top of described front wheel support leg 2 is hinged below chassis frame 1 top, and described front traveling wheel 3 is arranged on the bottom of front wheel support leg 2; The telescopic drive cylinder 6 is fixed horizontally under the top of the chassis frame 1, the telescopic drive cylinder 6 is located behind the front wheel leg 2, and the piston rod of the telescopic drive cylinder 6 faces forward; the guide rail 7 is horizontally fixed on the top of the chassis frame 1 Below, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More