High-speed gait generation method for underwater snake-like robot based on proximal strategy optimization
A snake-like robot and strategy technology, applied to underwater operation equipment, manipulators, program-controlled manipulators, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The method for generating high-speed gait of an underwater snake-like robot based on proximal strategy optimization of the present invention will be described in detail below with reference to the embodiments and the accompanying drawings.
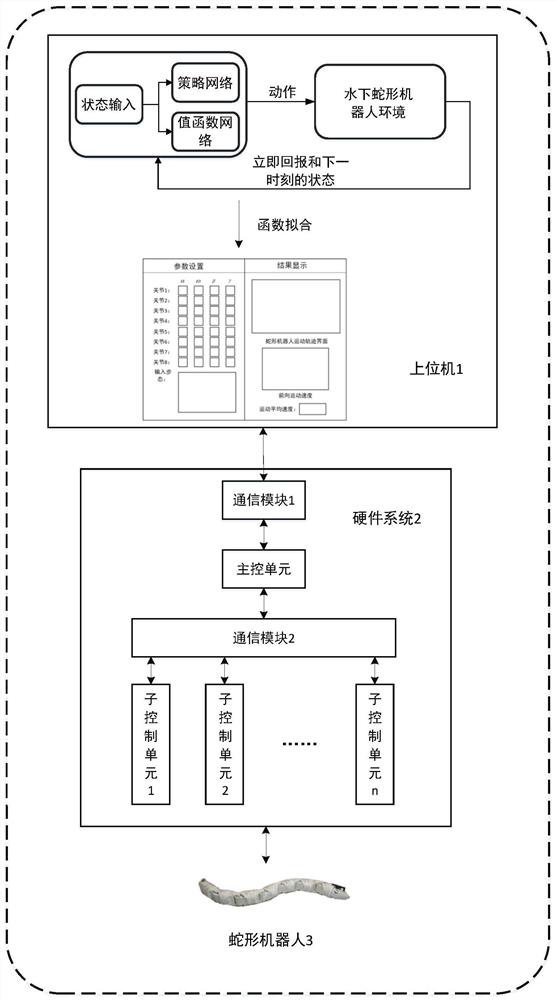
[0020] figure 1 This is a schematic diagram of the simulation platform and the experimental platform required by the method of the present invention. The simulation platform is used to complete the offline training process of the reinforcement learning algorithm, and the training results are converted into motion gait parameters by means of function fitting as the given parameters of the host computer. The experimental platform realizes the motion control of the underwater snake robot.
[0021] The realization of the high-speed gait generation method of the underwater snake-shaped robot based on the near-end strategy optimization of the present invention requires the joint completion of the upper computer and the hardware system of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More