

A method and system for point cloud intensity completion based on semantic segmentation
A semantic segmentation and intensity technology, applied in image enhancement, image analysis, instruments, etc., can solve problems such as lack of reference, less research on reflection intensity completion, and beam energy loss, so as to improve the accuracy of completion and overcome local dependence problem effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
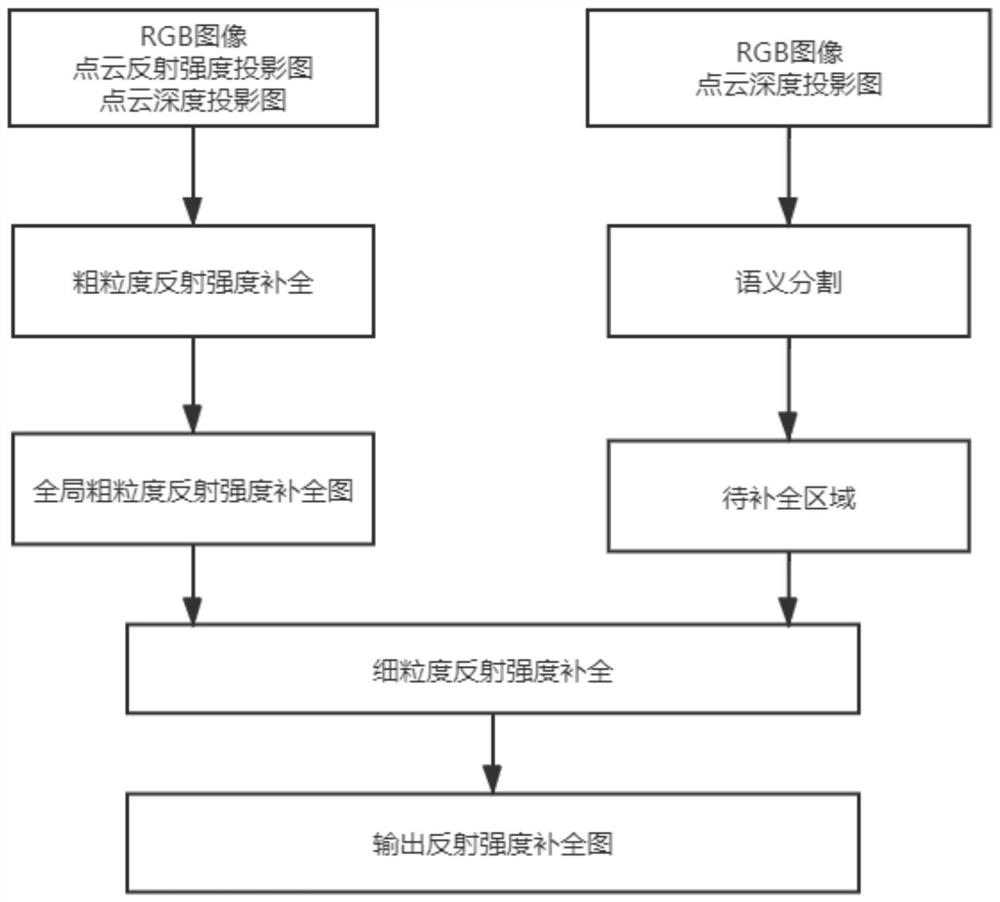
[0083] Such as figure 1 As shown, Embodiment 1 of the present invention proposes a point cloud intensity complement method based on semantic segmentation, and the specific implementation steps are as follows:
[0084] Step 1) Obtain the three-channel RGB image and point cloud data of the same scene respectively through the monocular camera and the lidar; specifically include:
[0085] Step 101) obtain the RGB image CI of road condition by vehicle-mounted monocular camera;
[0086] The image information of the front scene is collected by a forward-facing monocular camera or a forward-facing monocular camera installed on a driving vehicle. The forward-facing monocular camera collects road surface image information directly in front of the driving direction of the vehicle and above the road surface. That is, the collected road surface image information is a perspective view corresponding to information directly in front of the driving direction of the collected vehicle and abov...
Embodiment 2
[0147] Based on the above method, Embodiment 2 of the present invention proposes a point cloud intensity complement system based on semantic segmentation, which mainly includes a camera, a laser radar, and four modules, which are respectively a point cloud data preprocessing module, a coarse-grained reflection intensity complement Full module, semantic segmentation module, and fine-grained reflection intensity completion module, among which:
[0148] A camera for collecting RGB images of the road surface;
[0149] LiDAR, for synchronous collection of point cloud data of the road surface;
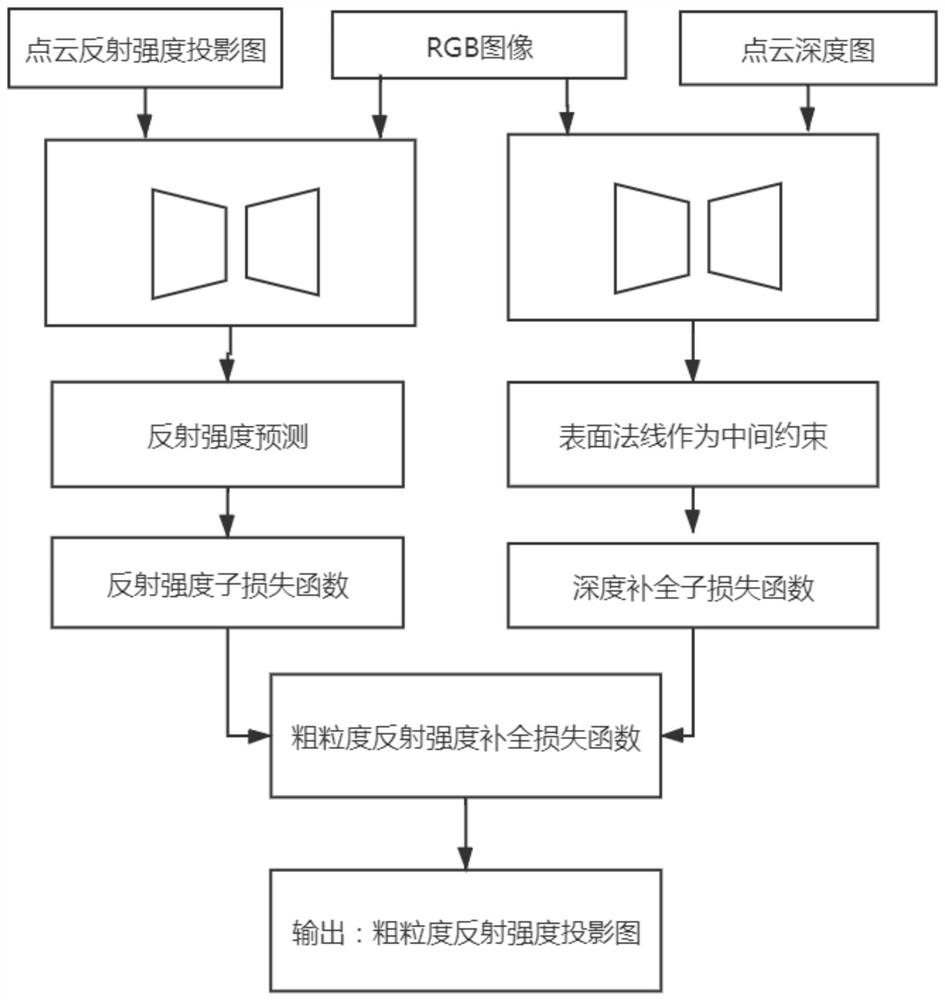
[0150] Point cloud data preprocessing module: According to the laser radar point cloud data, based on the calibration results of radar and camera, the three-dimensional point cloud is spatially transformed to generate a single-channel two-dimensional reflection intensity projection map and a single-channel two-dimensional depth projection map;
[0151] Coarse-grained reflection intensity co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More