

Control method for grinding robot to automatically identify workpiece and automatically replace clamp
A technology of automatic identification and automatic replacement, which is applied in the control of automatic replacement of fixtures and the field of automatic identification of workpieces by grinding robots. It can solve problems such as automatic replacement of fixtures that cannot be automatically recognized by workpieces, and achieve the effects of easy promotion and use, reduced operation difficulty, and simple operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
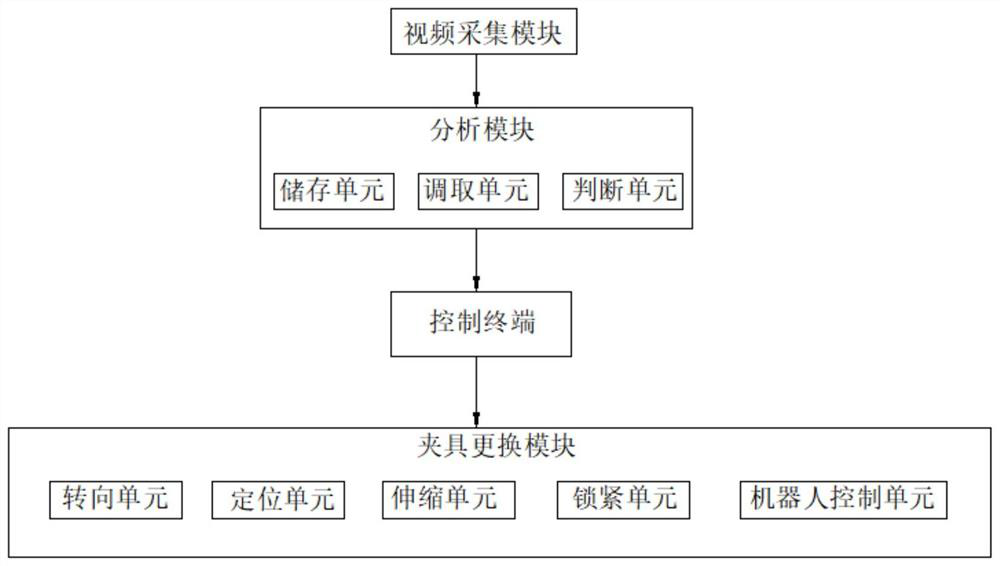
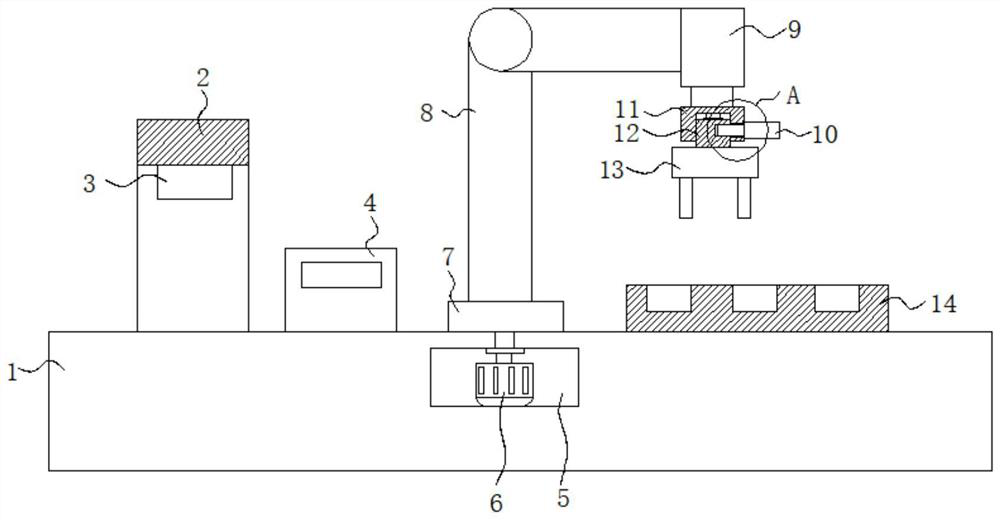
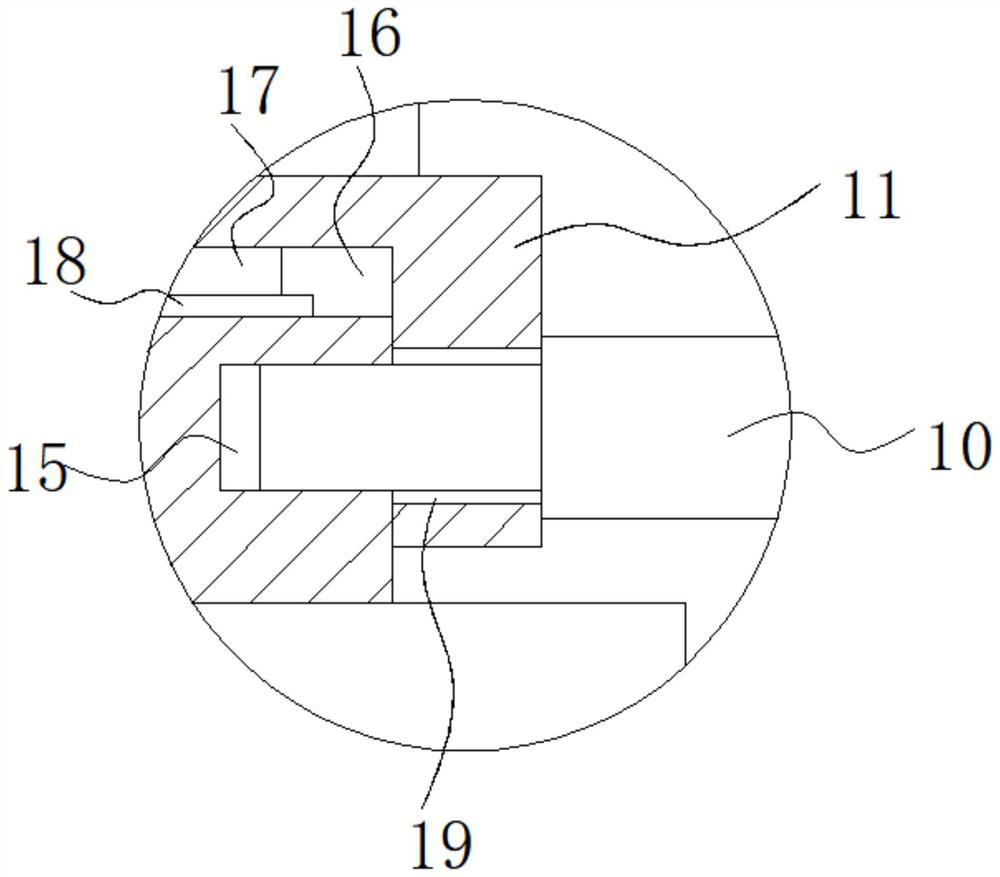
[0024] refer to Figure 1-3 , a control method for a grinding robot to automatically identify workpieces and automatically replace fixtures, including a video acquisition module, an analysis module, a control terminal and a fixture replacement module, the video acquisition module and the analysis module are electrically connected, the analysis module is electrically connected to the control terminal, and the control terminal It is electrically connected with the fixture replacement module. The analysis module is composed of a storage unit, a retrieval unit and a judgment unit. The retrieval unit is used to retrieve the data stored in the storage unit, and then input i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More