

A method for automatic synthesis of multi-robot distributed controllers from global tasks
A distributed controller, multi-robot technology, applied in the directions of comprehensive factory control, comprehensive factory control, program control, etc., can solve problems such as difficulty in application, reduce the scale of the solution, synthesize multi-robot controller The protocol is concise, improve The effect of computational efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
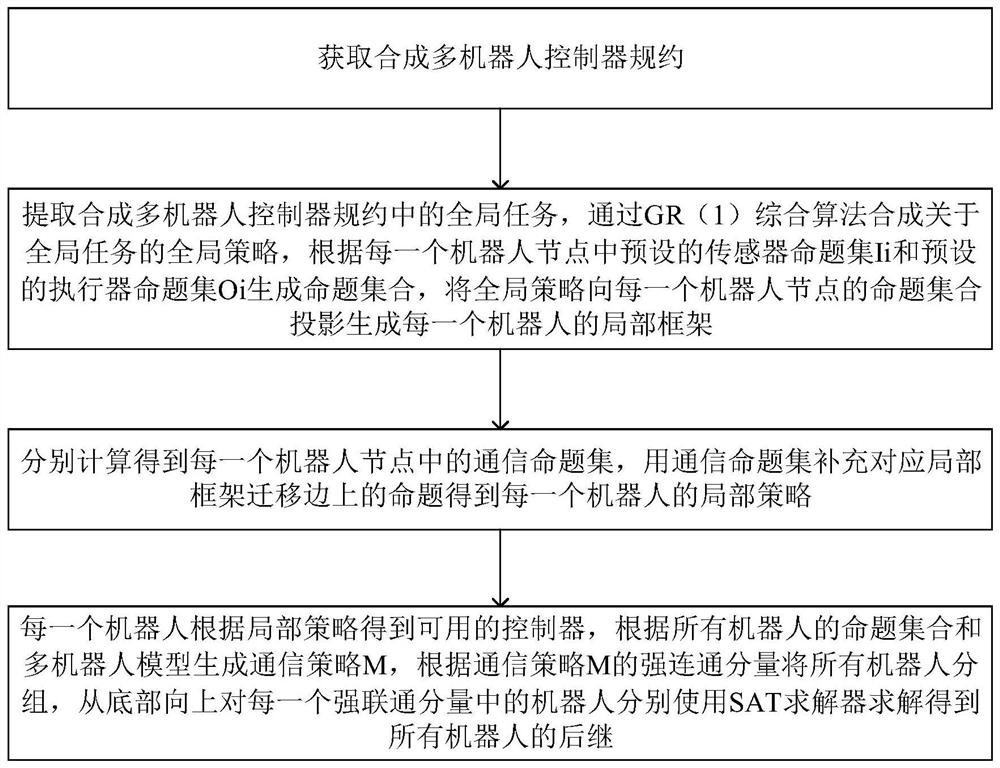
[0046] like figure 1 As shown, the method for automatically synthesizing a multi-robot distributed controller from a global task of the present invention comprises the following steps:
[0047] S1) Obtain a synthetic multi-robot controller specification, which includes a multi-robot model modeled as a set of robot nodes and a global task described by the GR(1) specification;
[0048] S2) Extract and synthesize the global tasks in the multi-robot controller specification, and synthesize the global strategy A about the global tasks through the GR(1) synthesis algorithm G , according to the preset sensor proposition set Ii and the preset actuator proposition set Oi in each robot node to generate a proposition seti ,O i >, will global policy A G The set of propos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More