

Method for automatically synthesizing multi-robot distributed controller from global task
A distributed controller and multi-robot technology, applied in the direction of comprehensive factory control, comprehensive factory control, program control, etc., can solve problems such as difficult to use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
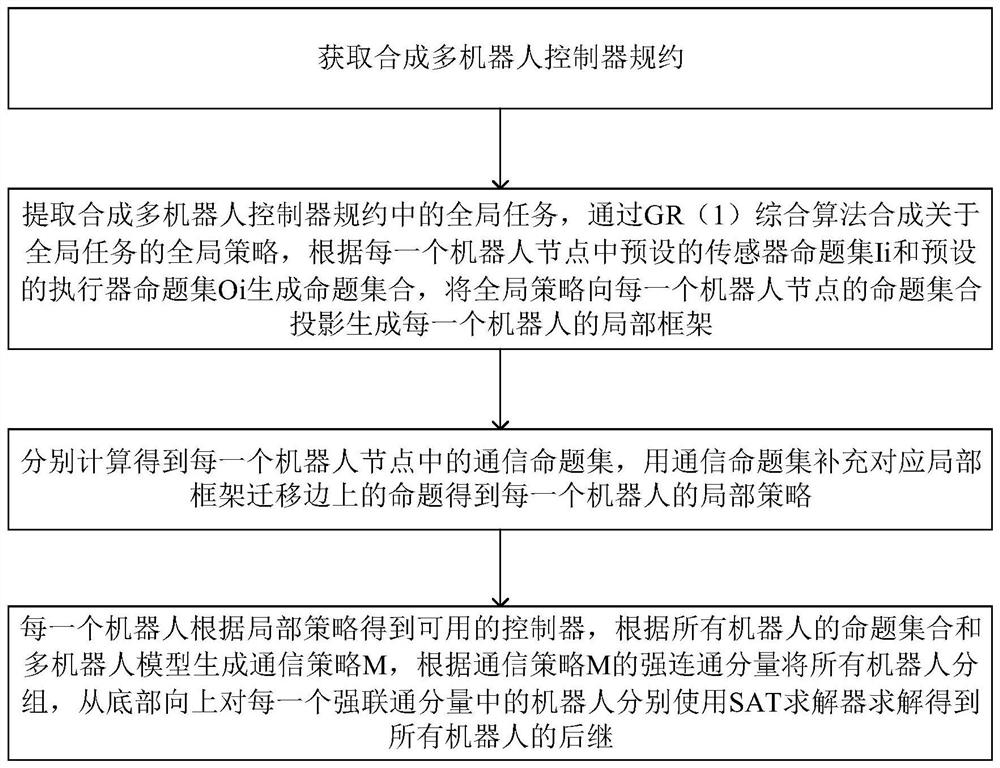
[0046] Such as figure 1 As shown, the method for automatically synthesizing a multi-robot distributed controller from a global task of the present invention comprises the following steps:
[0047] S1) Obtain a synthetic multi-robot controller specification, which includes a multi-robot model modeled as a set of robot nodes and a global task described by the GR(1) specification;
[0048] S2) Extract and synthesize the global tasks in the multi-robot controller specification, and synthesize the global strategy A about the global tasks through the GR(1) synthesis algorithm G , according to the preset sensor proposition set Ii and the preset actuator proposition set Oi in each robot node to generate a proposition seti ,O i >, will global policy A G To the proposi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More