

A mobile robot variable batch length iterative learning optimization control method
A mobile robot and iterative learning technology, which is applied in the field of variable batch length iterative learning optimization control of mobile robots, can solve the problems that the convergence speed and monotonicity cannot be well guaranteed, and achieve the effect of improving tracking performance and ensuring convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0177] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
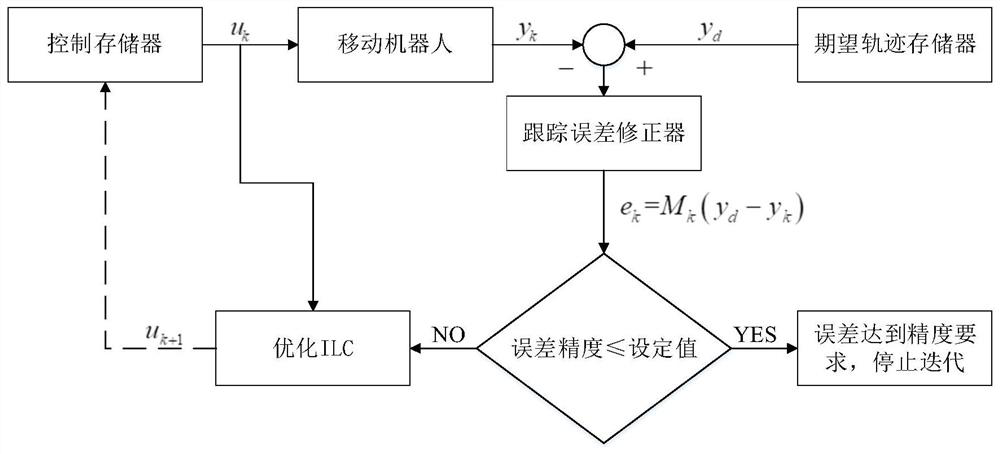
[0178] combine Figure 1-Figure 9 shown, please refer to figure 1 , which shows a block diagram of a control system model of a dual-rear-wheel independently driven rigid mobile robot disclosed in the present application. The controller input for batch k is u k , acting on the two independent rear wheel drive motors of the mobile robot can get the actual output y of the kth batch of the system k , which is compared with the set expected value stored in the expected trajectory memory, and the result is passed to the tracking error corrector to obtain the corrected tracking error e k . The corrected tracking error accuracy is compared with the set accuracy value, if the error accuracy does not reach the set accuracy, the corrected error e k with current controller input u k Pass to the optimized iterative learning controller to generate t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More