

Autonomous navigation method of AUV (Autonomous Underwater Vehicle) based on Unscented FastSLAM (Simultaneous Localization and Mapping) algorithm
An autonomous navigation and algorithm technology, applied in the field of robot navigation, can solve problems such as the decrease of sample diversity, the low real-time performance of the resampling algorithm, and the lack of particles in the particle filter.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0068] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
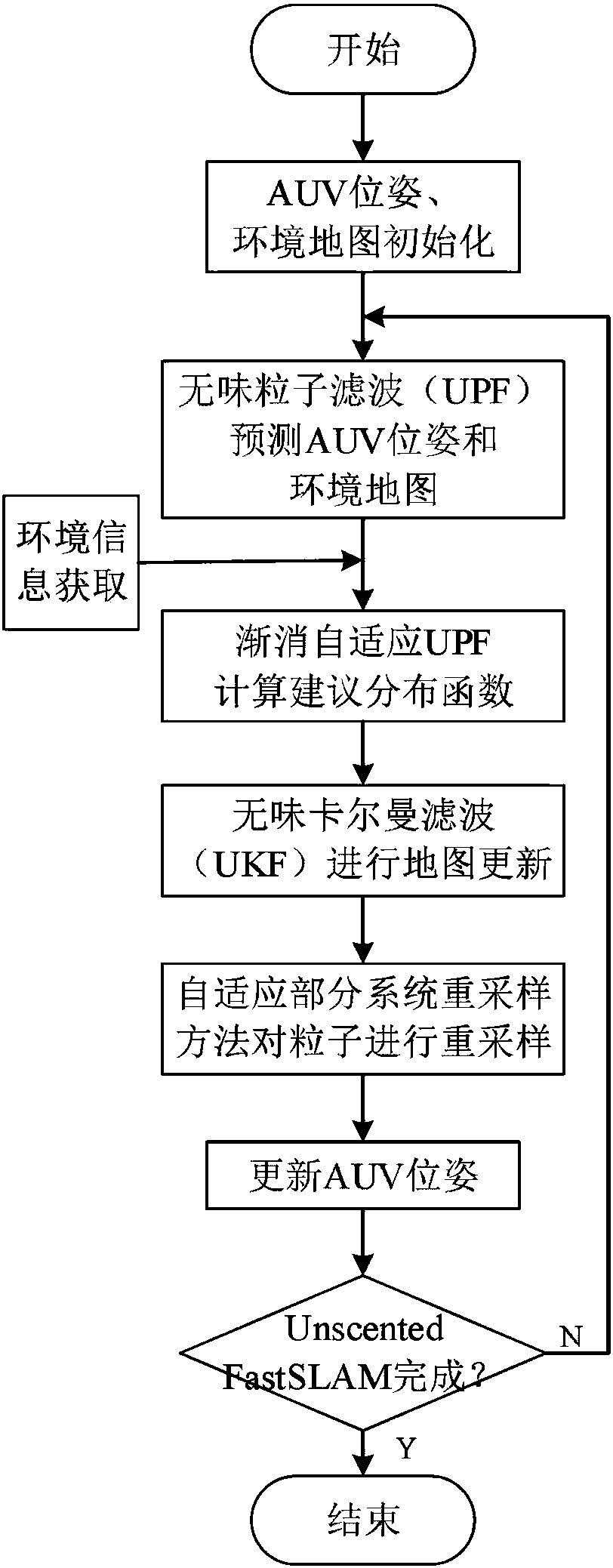
[0069] Such as figure 1 As shown, it is a flow chart of the UnscentedFastSLAM algorithm applied to AUV based on the fading adaptive tasteless Kalman filter combined with the adaptive partial system resampling method, and describes the processing process of the improved UnscentedFastSLAM; the specific steps are as follows:
[0070] Step 1: AUV obtains initial position information through the global positioning system GPS on the water surface; obtains initial velocity and attitude information through sensors such as Doppler log DVL, accelerometer, and gyroscope.
[0071] Among them, the initial position information of the AUV obtained by the global positioning system is longitude information and latitude information; the speed information of the AUV collected by the Doppler log is any one or any Several types; the AUV attitude angle information ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More