A flexible lower limb rehabilitation robot for assisting stroke patients in recovering gait
A rehabilitation robot and stroke technology, applied in the field of medical robots, can solve the problem of not considering or neglecting the ankle dorsiflexion during walking, and achieve the effect of reducing abnormal compensation, reducing walking metabolic consumption, and high comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will facilitate further understanding of the present invention in any form of techniques, but will not limit the invention in any form. It should be noted that several modifications and improvements can be made without departing from the concept of the present invention without departing from the concept of the present invention. These are all of the scope of protection of the present invention.
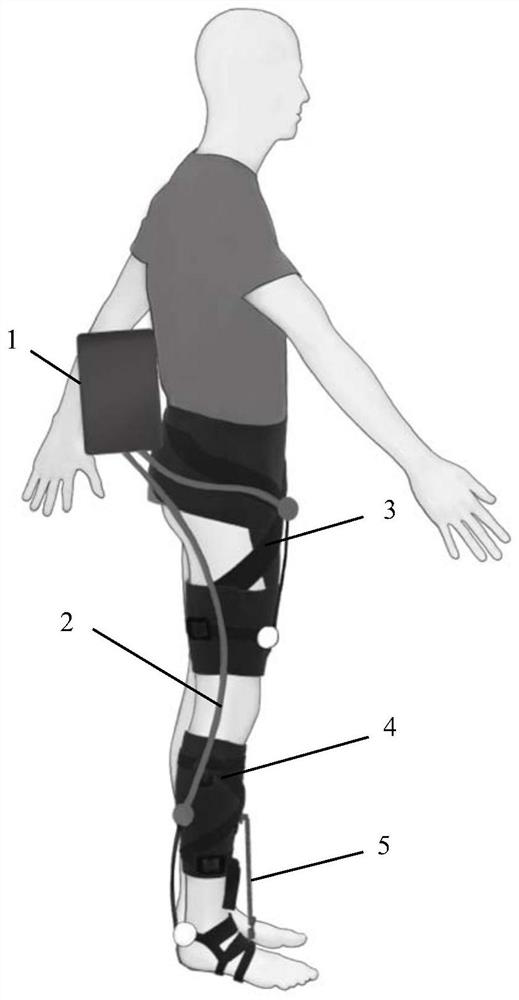
[0068] Refer figure 1 The overall structure of the flexible lower limb rehabilitation robot is a flexible lower limb rehabilitation robot for auxiliary stroke patients in the present invention; it is a flexible outer skeleton robot capable of multi-joint auxiliary lower extremity.
[0069] Including flexible outer bone set and driving execution module; flexible outer bone set includes hip joint-waist fixing module 3, ankle joint fixing module 4, and passive elas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More