

Intelligent trolley obstacle avoidance method based on fuzzy neural network
A fuzzy neural network and smart car technology, applied in the field of robotics, can solve problems such as poor global path planning ability, deadlock state, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
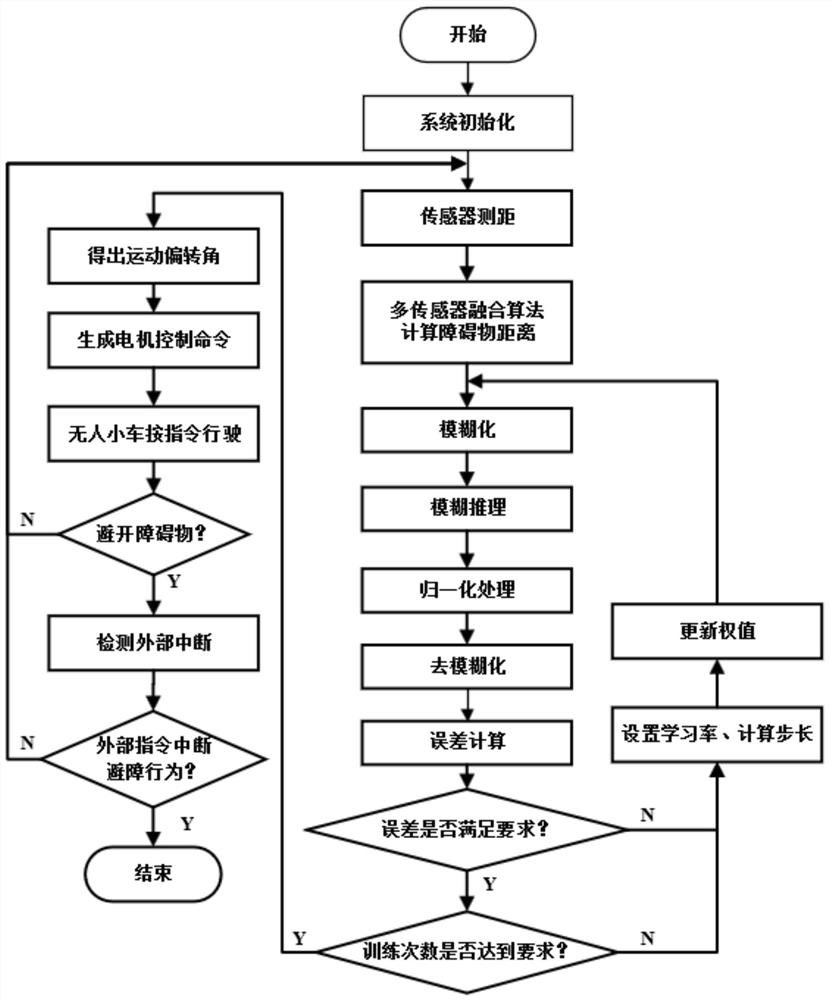
[0079] Such as figure 1 Shown, the present invention, a kind of intelligent car obstacle avoidance method based on fuzzy neural network, comprises the following steps:
[0080] S1. Define input and output variables, specifically:
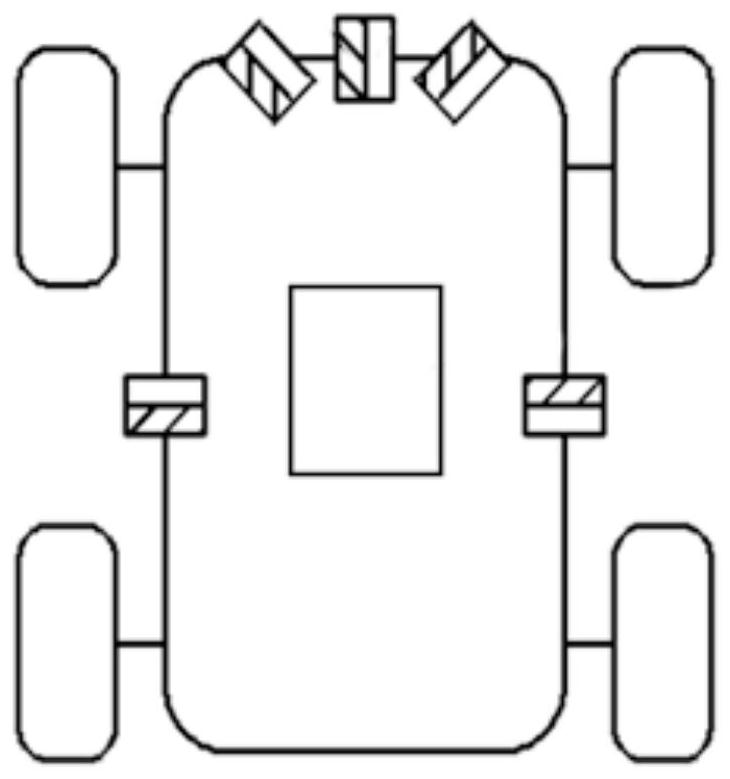
[0081] Define 6 input variables d 1 、d 2 、d 3 、d 4 、d 5 and θ, respectively represent the distance from the left side, left front side, front, right front side, right side of the smart car to the obstacle and the deflection angle of the smart car. where d 1 、d 2 、d 3 、d 4 and d 5 It is obtained by the ranging sensor installed on the smart car, and θ is measured by the angle sensor installed on the smart car. The output parameter is set as the deflection angle of the smart car, represented by TG.
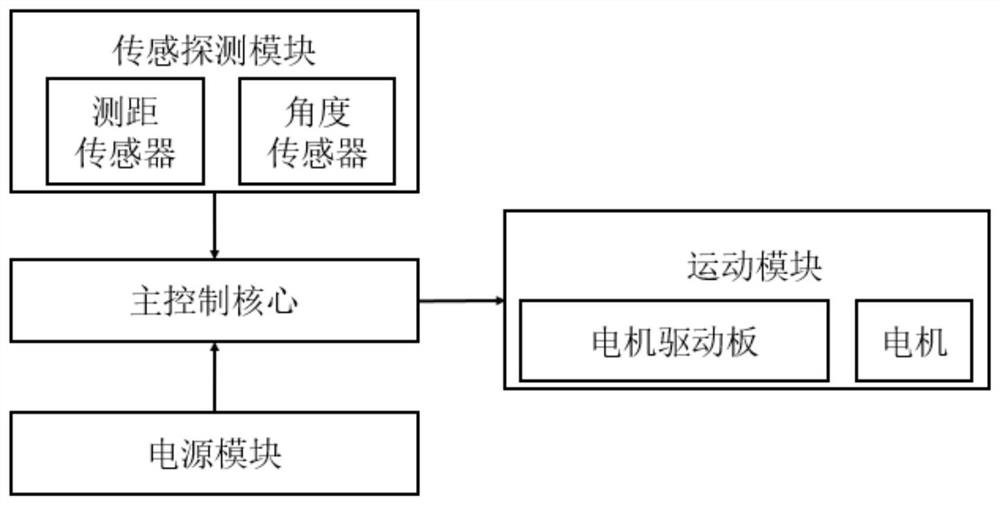
[0082] In this example, if figure 2 As shown, the smart car includes a sensor detection module, a main control core, a motion module and a power module, and the sensor detection module includes a distance sensor and an angle sensor; the motio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More