

Multi-target searching and capturing control method and system for swarm robots
A technology of swarm robots and control methods, applied in general control systems, control/regulation systems, adaptive control, etc., to achieve good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0093] First evolve the scene settings, specifically:
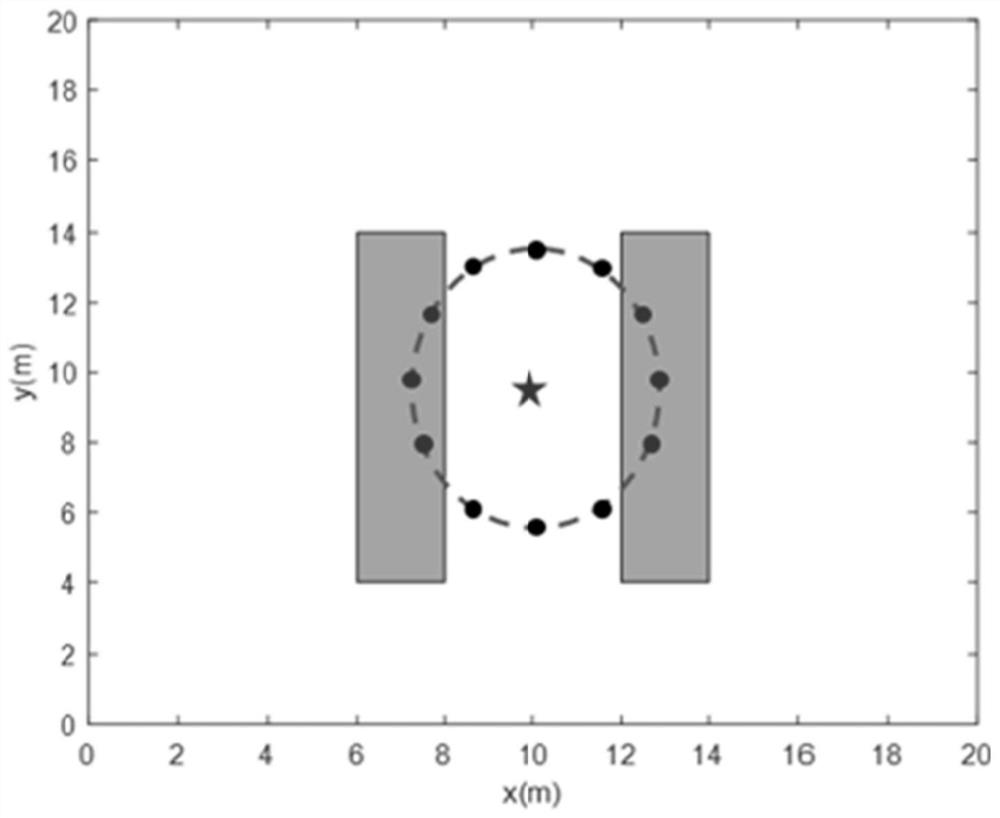
[0094] Set four narrow roads: strip narrow road 1, strip narrow road 2, circular narrow road, and triangular narrow road, and generate the corresponding fitness function value f of the structure according to the four narrow roads 1 . Specifically, one point is taken at each center position in the four narrow passages, and there are four points in total. The fitness function f at these 4 points 1 The sum is used as the fitness function value f of the parameter population 1 .
[0095]In order to obtain a parameter population that can generate adaptive encircling circles of obstacles of various shapes, the four channels established have variable shapes, different widths, and include both straight and curved boundaries, so they can be used to simulate more complex scenes. If the total fitness value function of a parameter population at these four points can be smaller, it means that the encircling circle generated by the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More