

Unmanned combat aircraft cluster encirclement control method simulating wolf pack hunting behavior
A combat aircraft and control method technology, applied in the direction of non-electric variable control, control/adjustment system, three-dimensional position/course control, etc., can solve the problems of large calculation requirements and difficulty in forming encircled formations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
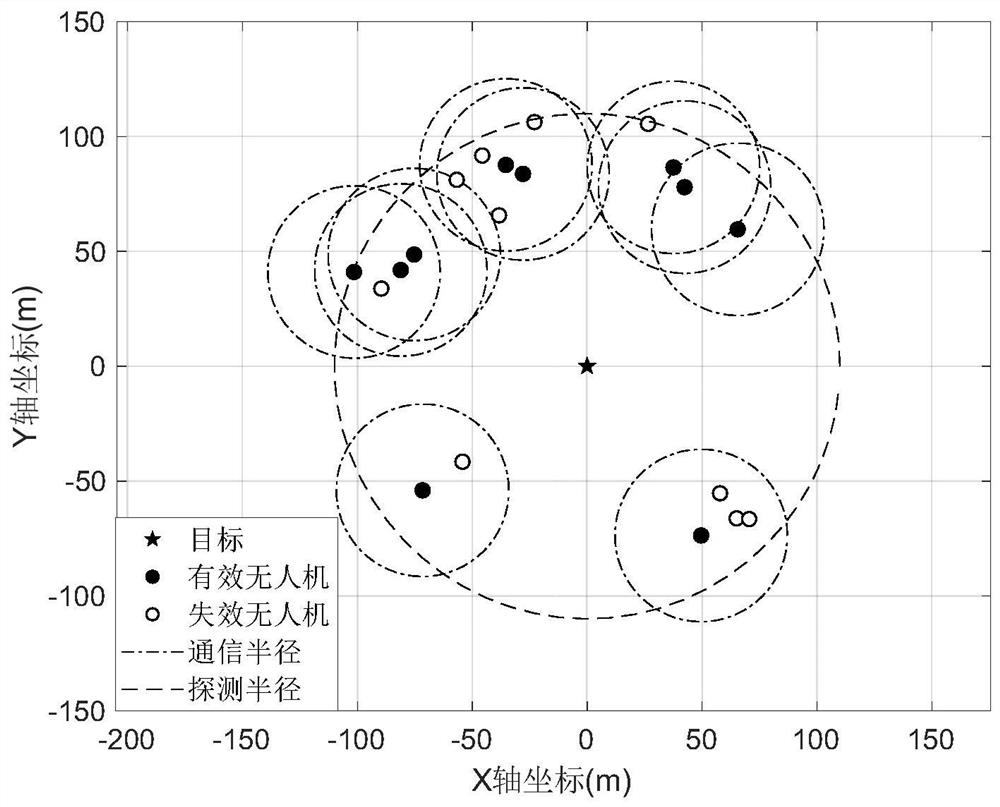
[0098] The effectiveness of the encirclement control method proposed by the present invention will be verified below through specific examples. In this example, 20 UAVs are selected to form a cluster. The initial airspeed and heading of each aircraft are randomly selected within the interval (10, 20) m / s and (0, 2π), and the pitch angle is zero. Assume that the target motion rule satisfies the following acceleration spiral maneuver instruction
[0099]
[0100] Among them, u P =(u P,x , u P,y , u P,z ) T is the target three-dimensional acceleration control vector; v P =(v P,x ,v P,y ,v P,z ) T is the target three-dimensional velocity vector; T max =200s is the maximum simulation time. The UAV cluster forms a circle around the target when the perception distance is limited, and its detection radius is r d =110m, the communication radius is r c = 40m. UAV swarms are divided into N L = 10 detection drones and N F = 10 disabled drones. Each machine and the star...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More