Joint connecting structure of robot and robot
A connection structure and robot technology, applied in the direction of joints, manipulators, program-controlled manipulators, etc., can solve problems such as general flexibility, and achieve the effects of good transmission stability, high bionics, and high flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
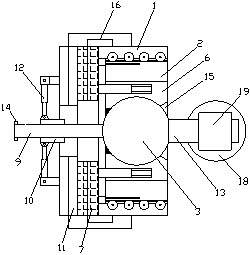
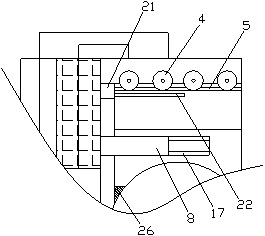
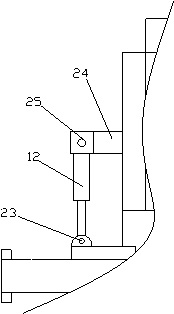
[0033] Such as Figure 1-4As shown, a joint connection structure of a robot includes an outer ring body 1, a rotating bearing 2, and a joint sphere 3, and a guide wheel 4 is provided in the outer ring 4, and the guide wheel 4 is rotated to the outer ring 1 The guide groove 5 facing the guide wheel 4 is provided on the outer ring of the rotating bearing 2, the guide wheel 4 inserted into the guide groove 5, the outer ring of the rotating bearing 2 through the guide groove 5 and the guide wheel 4 Slide with the outer ring 1, the inner ring of the rotating bearing 2 is fixedly provided with a retaining ring body 6, and the inner ring surface of the retaining ring 6 is formed with a limit slot corresponding to the joint sphere 3 (not The joint ball body 3 is attached to the limit slot, the joint ball body 3 is attached to the retaining ring 6 through the limit slot and positioned in the retaining ring 6, and the rotating bearing 2 is provided for The first electric turntable 7 that dri...
Embodiment 2
[0039] Such as Figure 1-5 As shown, a joint connection structure of a robot includes an outer ring body 1, a rotating bearing 2, and a joint sphere 3, and a guide wheel 4 is provided in the outer ring 4, and the guide wheel 4 is rotated to the outer ring 1 The guide groove 5 facing the guide wheel 4 is provided on the outer ring of the rotating bearing 2, the guide wheel 4 inserted into the guide groove 5, the outer ring of the rotating bearing 2 through the guide groove 5 and the guide wheel 4 Slide with the outer ring 1, the inner ring of the rotating bearing 2 is fixedly provided with a retaining ring body 6, and the inner ring surface of the retaining ring 6 is formed with a limit slot corresponding to the joint sphere 3 (not The joint ball body 3 is attached to the limit slot, the joint ball body 3 is attached to the retaining ring 6 through the limit slot and positioned in the retaining ring 6, and the rotating bearing 2 is provided for The first electric turntable 7 that dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More