

A digital-analog hybrid valve-controlled hydraulic robot system
A hybrid technology of hydraulic robot and simulation, which is applied in the direction of program control manipulator, manipulator, liquid distribution, transportation or transfer device, etc. It can solve the problems of insufficient control precision and achieve slender body, compact structure, high stability and motion precision Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in detail below with reference to the accompanying drawings, and it is hereby stated that the present invention will be explained by this exemplary embodiment, but it is not intended to limit the present invention.
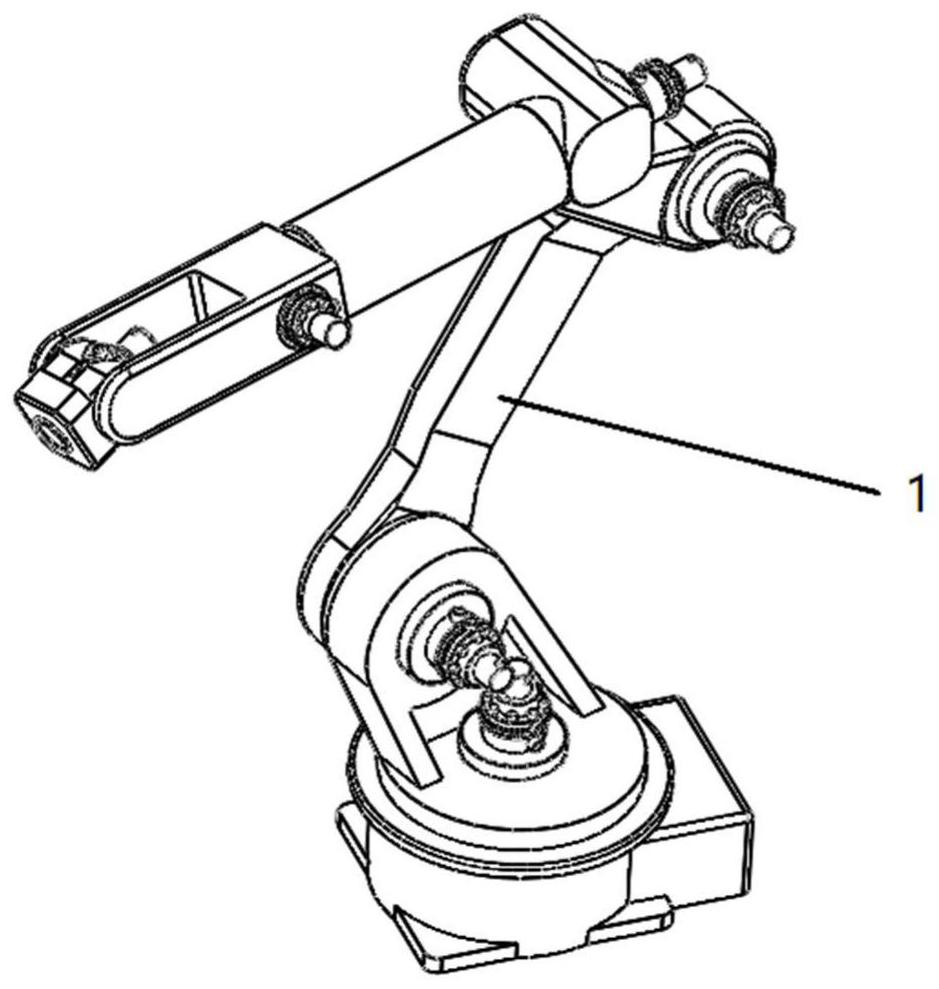
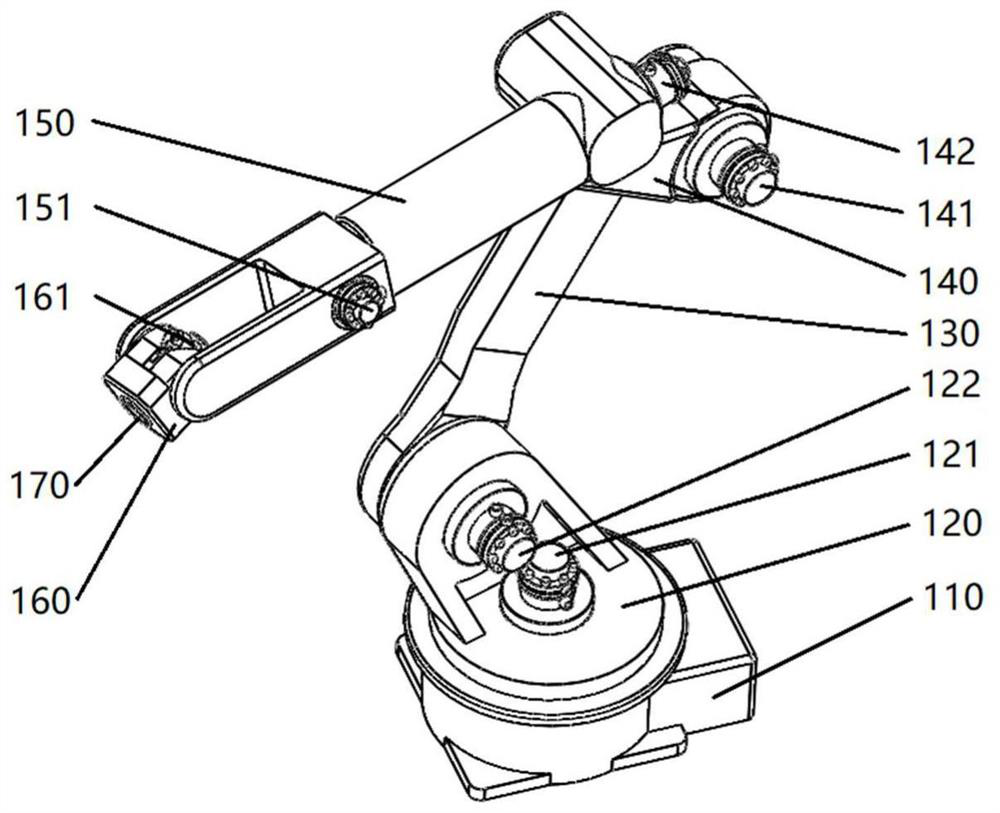
[0041] see figure 1 and figure 2 , A digital-analog hybrid valve-controlled hydraulic robot system proposed by the present invention includes a robot mechanical body 1, a power system and a sensor detection and control system. The robot arm body includes the robot base 110, the robot waist part 120 is connected to the robot base 110 through the rotating pair, the robot arm part 130 is connected to the robot waist part 120 through the rotating pair, and the robot middle arm part 140 is connected to the robot through the rotating pair. The big arm part 130 is connected, the robot small arm part 150 is connected with the robot middle arm part 140 through the rotating pair, the robot wrist part 160 is connected with the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More