Asymmetric steel plate hoisting equipment
A kind of hoisting equipment, asymmetric technology, applied in the direction of safety devices, transportation and packaging, load hanging components, etc., can solve problems such as falling, equipment damage, fixture damage, etc., to achieve good use effect, high safety, structure simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The accompanying drawings are all schematic diagrams of the implementation of the present invention, so as to understand the principle of structural operation. The specific product structure and proportional size can be determined according to the use environment and conventional technology.
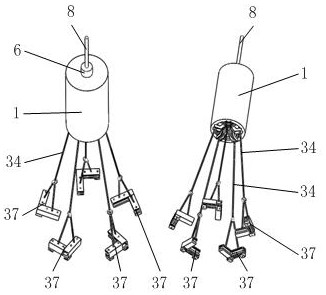
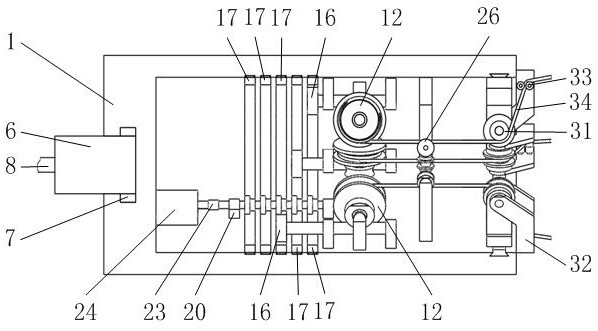
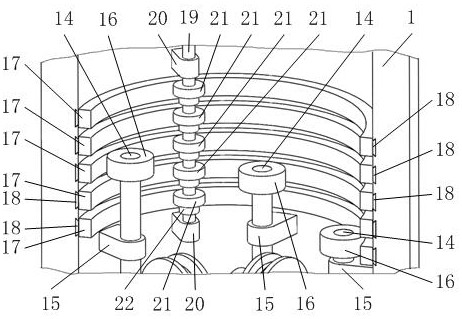
[0030] like figure 1 , 2 As shown, it includes a suspension tube 1, a winding wheel 12, an electric drive module 24, a sling B34, and a fixture mechanism 37, wherein as figure 1 , 2 , 5, the suspension tube 1 is installed on the crane rope A8, and the suspension tube 1 is equipped with a plurality of winding wheels 12 driven by the electric drive module 24 that are uniformly distributed in the circumferential direction and whose central axis is perpendicular to the central axis of the suspension tube 1; figure 1 , 2 , 6, each winding wheel 12 is wound with a suspension rope B34, and each suspension rope B34 end is equipped with a fixture mechanism 37 that cooperates with the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



