

Optimal path planning method and readable storage medium for manipulator to grab products
An optimal path planning and optimal path technology, applied in the field of manipulators, can solve the problems of low grabbing efficiency, difficulty in obtaining the optimal path, unreasonable path planning, etc., and achieve the effect of improving grabbing efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the accompanying drawings and the specific embodiments.
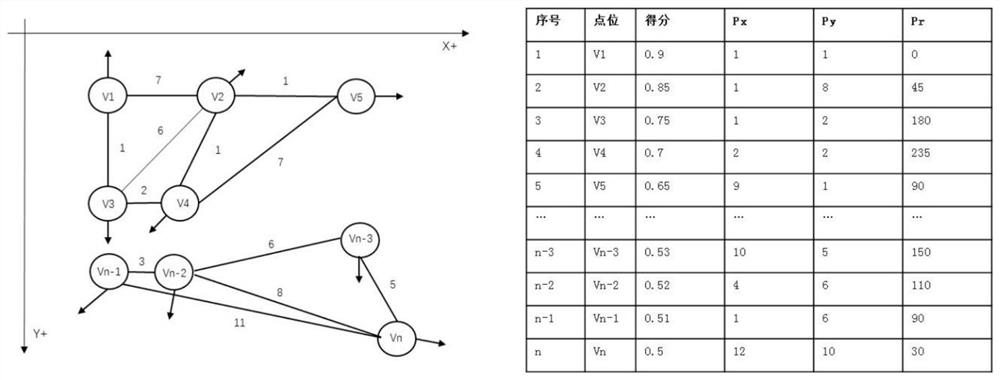
[0024] Path D=7+6+2=22
[0025] The angle change R=45+135+55=235.
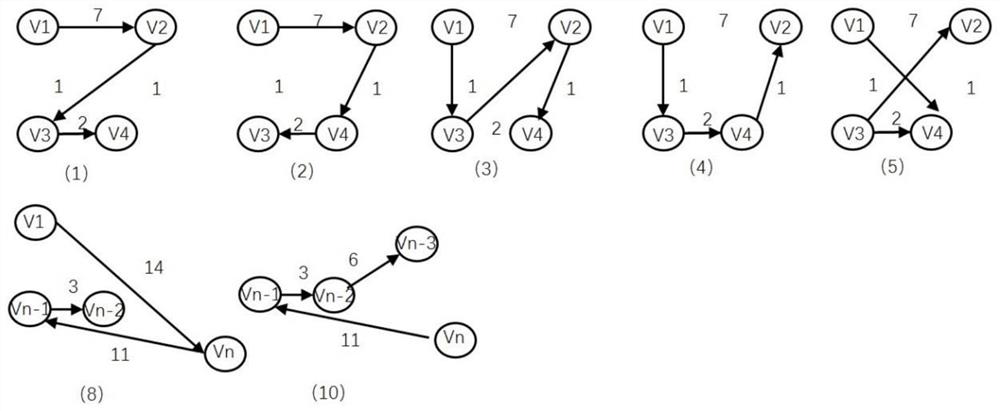
[0028]①dis[0][0]={V1, V2, V3, V4}
[0029] ②dis[0][1]={V1, V2, V4, V3}
[0030] ③dis[0][2]={V1, V3, V2, V4}
[0031] ④dis[0][3]={V1, V3, V4, V2}
[0032] ⑤dis[0][4]={V1, V4, V3, V2}
[0033] ⑥ dis[0][5]={V1, V4, V2, V3}
[0034] ⑦
[0036] ⑨......
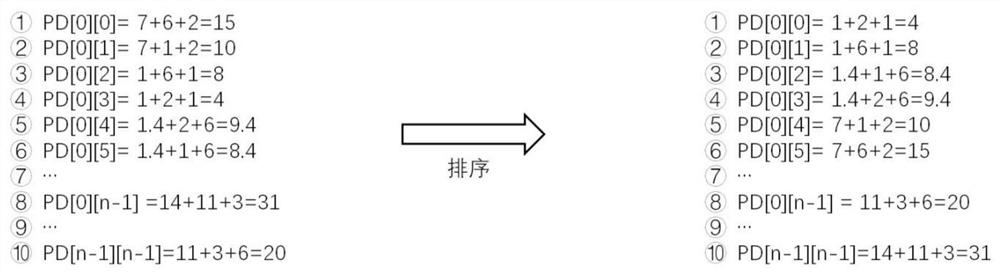
[0039]①PD[0][0]=7+6+2=15
[0040] ②PD[0][1]=7+1+2=10
[0041] ③ PD[0][2]=1+6+1=8
[0042] ④PD[0][3]=1+2+1=4
[0043] ⑤PD[0][4]=1.4+2+6=9.4
[0044] ⑥ PD[0][5]=1.4+1+6=8.4
[0045] ⑦
[0047] ⑨...
[0051]
[0053] Taking dis[0][0]={V1, V2, V3, V4} as an example, I, j, k, and l are the correspondences of the V1, V2, V3, and V44 group path points respectively
[0054]
[0059] 6. Select the optimal path dis[0][3]={V1, V3, V4, V2} as the point data of the product being grasped by the manipulator.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More