

Automatic driving dangerous target determination method and device
An automatic driving and target technology, applied in the field of automatic driving, can solve the problem of unable to screen out dangerous targets, unable to identify potential dangerous targets, etc., to take into account driving safety and comfort, get rid of dependencies, avoid false triggers and leakage. Triggered effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
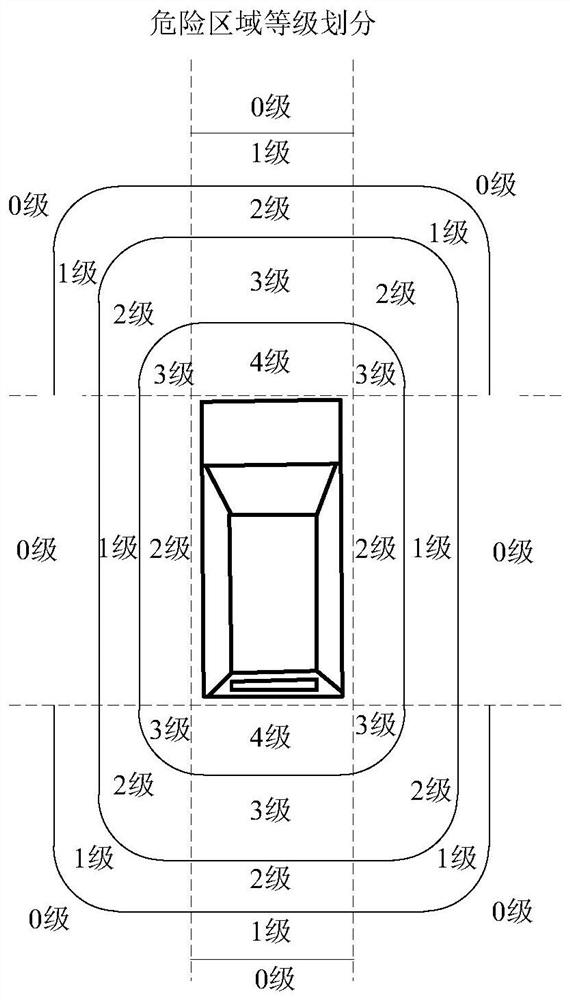
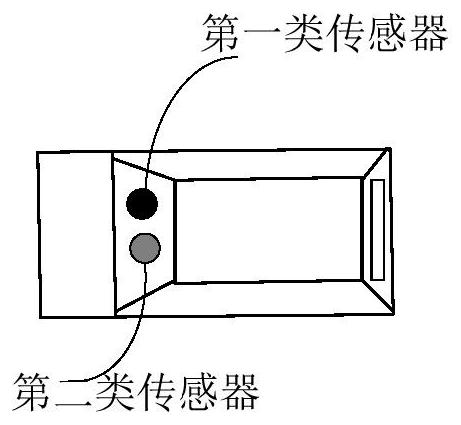
[0069] Generally speaking, the identification of dangerous targets includes two steps: the first step is to identify potentially dangerous targets from the targets around the vehicle: the on-board sensors perceive the targets around the vehicle as comprehensively as possible, and pass the relevant information to the target screening module. The second step is to screen out dangerous targets from potentially dangerous targets: the target screening module selects the correct dangerous targets from potentially dangerous targets. The dangerous objects corresponding to different application types may be different. For example, the dangerous object corresponding to AEB is the braking object, and the object corresponding to the Adaptive Cruise Control (ACC) is the following object. Wherein, regarding the first step, traditional methods include the following methods 1 and 2:
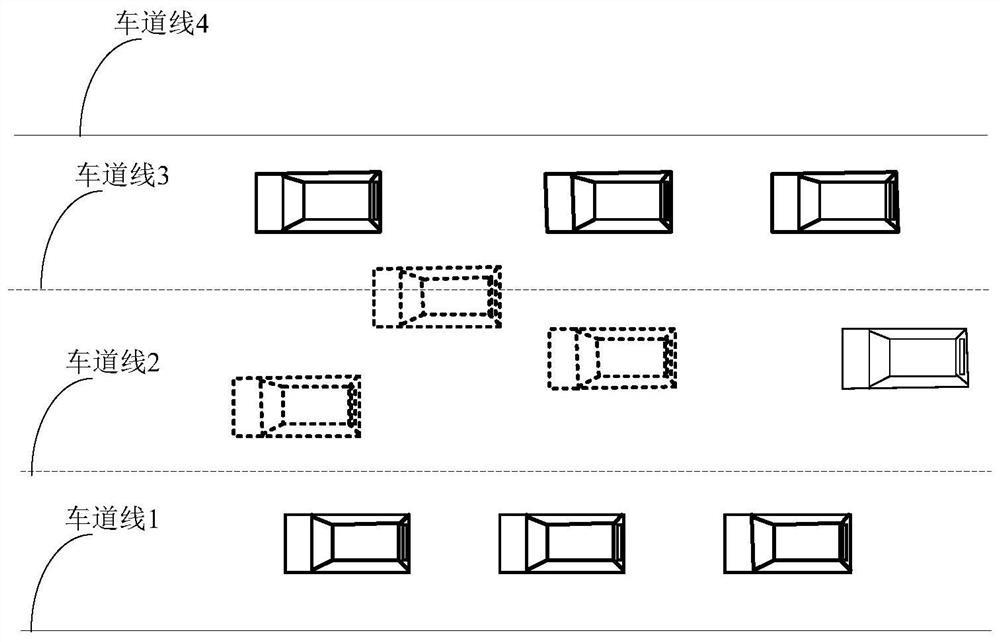
[0070] Method 1. Potentially dangerous targets are acquired based on lane lines.
[0071] For example, pleas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More